
1. 模型描述
这是一个使用创成式方法(即经拓扑优化和后处理)设计的机械手臂模型。完整模型是一个包含7个零部件的装配体。 模拟机械手臂底部固定、手爪位置抓取重物的工况下,结构整体的位移,及手臂重点位置的应力结果。

2. 软件启动及模型导入
打开PERA SIM,创建一个结构静力分析项目。可以看到,在结构分析中,目前软件支持的分析类型已经比较全面。包括静力、瞬态动力学、模态分析、谐响应分析、反应谱分析、特征屈曲、稳态和瞬态热分析等。
 创建新的结构分析模型界面 PERA SIM其实还包含流体、电磁、声学等分析模块,界面整体设计风格保持一致。这里没有显示。 软件启动后,整体界面和2021版本相比,变化非常明显。界面的配色更为清爽,菜单栏和模型树的图标整体经过重绘,界面全局改造为Ribbon风格。
创建新的结构分析模型界面 PERA SIM其实还包含流体、电磁、声学等分析模块,界面整体设计风格保持一致。这里没有显示。 软件启动后,整体界面和2021版本相比,变化非常明显。界面的配色更为清爽,菜单栏和模型树的图标整体经过重绘,界面全局改造为Ribbon风格。  PERA SIM 2022新界面 软件GUI支持单位制,是一款有限元仿真软件的美德。
PERA SIM 2022新界面 软件GUI支持单位制,是一款有限元仿真软件的美德。 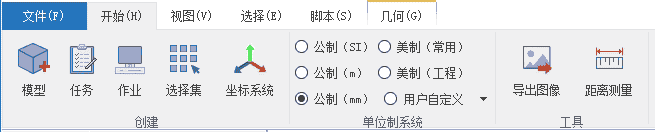 开始选项卡,可以设置软件的单位制系统 在软件界面上,仍有不同模块的下拉菜单。包括草图、几何、 格、属性、连接、任务、载荷、作业、结果等。在每一个模块,上方Ribbon菜单会出现一个内容敏感选项卡。
开始选项卡,可以设置软件的单位制系统 在软件界面上,仍有不同模块的下拉菜单。包括草图、几何、 格、属性、连接、任务、载荷、作业、结果等。在每一个模块,上方Ribbon菜单会出现一个内容敏感选项卡。 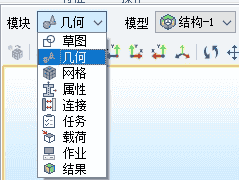 如果需要在PERA SIM软件里直接建模,可以在软件里绘制草图然后选择拉伸等操作。更复杂的模型则允许直接导入通用格式的几何文件。
如果需要在PERA SIM软件里直接建模,可以在软件里绘制草图然后选择拉伸等操作。更复杂的模型则允许直接导入通用格式的几何文件。  几何选项卡,功能比较丰富 导入几何时,还可以设置一些几何修复选项。
几何选项卡,功能比较丰富 导入几何时,还可以设置一些几何修复选项。 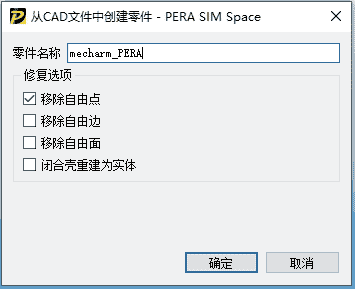 导入几何以后,可以看到模型默认的配色,饱和度不高,展示效果很漂亮。
从外部导入的stp格式机械手臂几何模型 在左侧项目窗口,可以看到模型树。所有图标的色调保持一致为淡蓝色,非常清爽。实体几何中包含的组件,以及组件的中-英文部件名,都正确导入了PERA SIM软件中。
导入几何以后,可以看到模型默认的配色,饱和度不高,展示效果很漂亮。
从外部导入的stp格式机械手臂几何模型 在左侧项目窗口,可以看到模型树。所有图标的色调保持一致为淡蓝色,非常清爽。实体几何中包含的组件,以及组件的中-英文部件名,都正确导入了PERA SIM软件中。 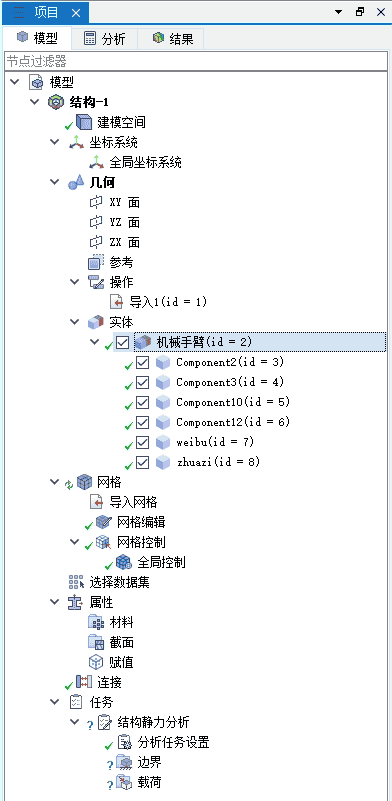
3. 格划分与边界条件
几何导入后,下一个模块就是 格划分。 格选项卡支持导入外部生成的 格模型,也支持全局和局部的 格划分控制。
 格模块- 格选项卡相关功能命令 什么也别管,先……直接用默认设置画一套 格试试?
格模块- 格选项卡相关功能命令 什么也别管,先……直接用默认设置画一套 格试试?  使用全默认设置画出的机械手臂 格 可以看出,这个模型中各部分的特征尺寸差异很大。在手臂尖端附近,和两段手臂模型处,特征尺寸相对较小。默认的 格尺寸与模型的细节特征相比还是稍显粗糙。但其实放大仔细看,这个 格质量也还勉强过得去,也是可以提交计算的。 我们清除掉默认 格,来看看全局和局部 格控制都有哪些功能。 在全局 格控制面板,基本设置与2021版本差别不大,可以使用自适应 格尺寸。取消勾选自适应大小后,可以看到 格尺寸设置后面,用蓝色字体显示了对应单位 mm。
使用全默认设置画出的机械手臂 格 可以看出,这个模型中各部分的特征尺寸差异很大。在手臂尖端附近,和两段手臂模型处,特征尺寸相对较小。默认的 格尺寸与模型的细节特征相比还是稍显粗糙。但其实放大仔细看,这个 格质量也还勉强过得去,也是可以提交计算的。 我们清除掉默认 格,来看看全局和局部 格控制都有哪些功能。 在全局 格控制面板,基本设置与2021版本差别不大,可以使用自适应 格尺寸。取消勾选自适应大小后,可以看到 格尺寸设置后面,用蓝色字体显示了对应单位 mm。  全局 格控制界面及选项 在局部 格控制界面,我们可以单独选中修改对应几何部件的 格尺寸。
全局 格控制界面及选项 在局部 格控制界面,我们可以单独选中修改对应几何部件的 格尺寸。  局部 格控制-对象选择界面 定义好全局和局部 格尺寸及单元阶数信息后,可以画出质量更高的机械手臂 格。
局部 格控制-对象选择界面 定义好全局和局部 格尺寸及单元阶数信息后,可以画出质量更高的机械手臂 格。  划分好的四面体 格 接下来定义属性。在属性模块,创建材料、截面,将二者赋予给实体即可。PERA SIM 2022版本的材料库功能,内置了许多常用材料的弹性模量、泊松比等参数。
划分好的四面体 格 接下来定义属性。在属性模块,创建材料、截面,将二者赋予给实体即可。PERA SIM 2022版本的材料库功能,内置了许多常用材料的弹性模量、泊松比等参数。 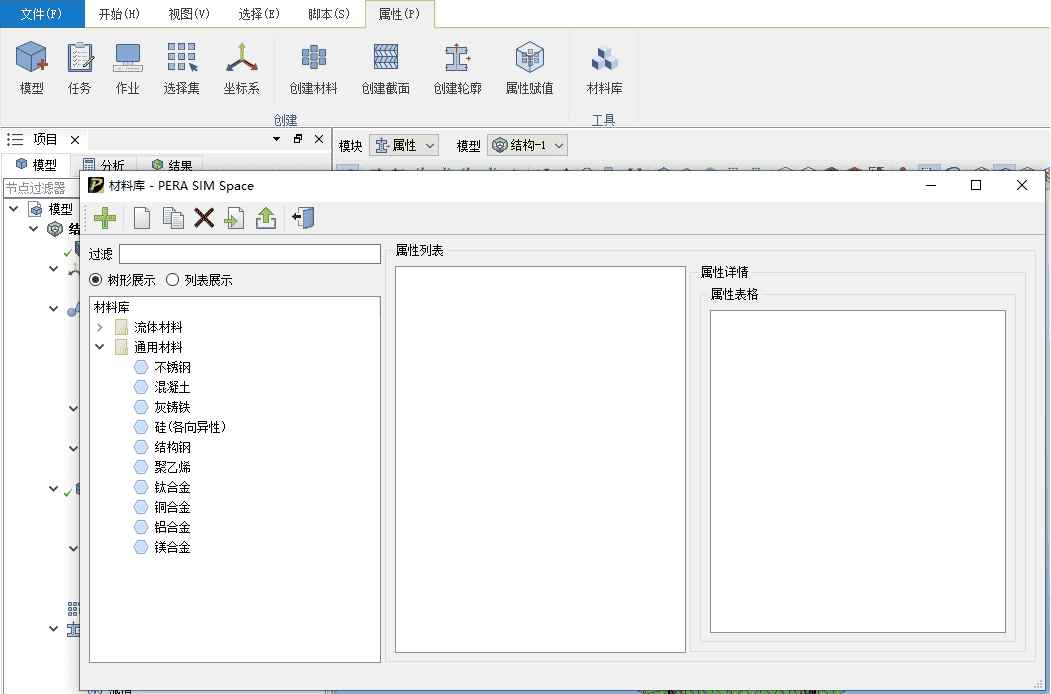 材料库窗口 在属性定义界面,可以看到PERA SIM这个版本中,已经支持了线弹性、塑性和结构阻尼参数的输入。对于热分析,还支持热导率和比热性质。
材料库窗口 在属性定义界面,可以看到PERA SIM这个版本中,已经支持了线弹性、塑性和结构阻尼参数的输入。对于热分析,还支持热导率和比热性质。 
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!