

通过基于仿真的测试和验证框架获得安全性、舒适性与燃油效率之间的平衡
摘要
近来,汽车行业对 ADAS 和自动驾驶车辆 (AV) 技术的需求正在迅猛增长,以期借此提供安全无忧、舒适环保的车辆。这些系统已超越自动紧急制动 (AEB) 和牵引力控制等以车辆为中心的辅助应用,能够整合交通和环境信息。Simcenter 工程服务为这些高级应用开发了模型预测控制 (MPC) 算法。在此过程中,机械、电气工程、控制、通信和计算机科学等领域协作开展了一系列研发活动。
在本白皮书中,我们提出了一种基于协同仿真的框架和技术,可用于在开发的早期阶段对这些基于 MPC 的ADAS/AV 控制系统进行前端加载测试、确认和验证。该仿真工具集对车辆动力学、交通环境、车辆对车辆(V2V)、车联 (V2X)、传感器模型、规划和控制算法进行了全方位考量,并将通过三个 ADAS 应用示例进行演示:自适应巡航控制、绿波技术和自动泊车。
自动驾驶行业现已清晰地认识到,基于仿真的测试能够行之有效地验证 ADAS/AV 功能。交通环境中存在各种路型和路况、车辆、行人、骑行者、障碍物和天气状况,每个场景都涉及多种参数组合。场景的数量将随着参数的数量呈指数级增长,甚至可以达到数百万种。通常情况下,为了使用真实汽车测试来实现可靠的验证,汽车需要行驶数百万乃至数十亿公里,这不仅极度耗时,而且成本高昂 1。此外,并非所有场景都可以在现实生活中轻松进行仿真和再现。值得注意的是,真实路测对于特定的机械、电气和软件配置十分有效。但如果需要适应新的配置或软件更新,则必须要再次进行测试。因此,大多数 ADAS 性能应通过大规模仿真进行验证,也正因如此,模型在环测试 (MiL) 和软件在环测试 (SiL) 验证将在开发流程中扮演愈发重要的角色。

图 1:ADAS/AV 协同仿真结构。
它们需要在各种交通场景中确保安全性,同时将非完整特性、加速度和转向约束等车辆动力学约束考虑在内
汽车应该以类似于人类驾驶的方式驾驶;也就是说,不仅需要安全合法,而且需要平稳舒适。这一要求颇具挑战性,特别是在市内行驶或在高速公路上高速行驶时尤为如此。
作为自动驾驶技术的主要驱动因素之一,客户要求自动驾驶车辆必须比传统汽车更环保、更省油。随着政府对燃油经济性和污染的要求日益严苛,控制规范也受到了影响。
考虑到所有这些挑战性因素,最好在基于仿真的框架内验证规划和控制算法的开发,并在其中囊括所有物理和环境因素。

图 2:自动制动系统概念。
提议的 ADAS/AV 测试框架是西门子自动驾驶验证和确认框架的一部分,可用于 4 级和 5 级自动驾驶车辆的开发。凭借集成电路、系统和整车的设计与性能验证解决方案,该框架实现了开发流程的连续性。它基于两款软件产品的协同仿真:Simcenter Amesim 和 SimcenterPrescan。Simcenter Amesim 提供一款集成式仿真平台,可以准确预测智能系统的多学科性能,尤其是车辆动力学性能。它提供了工厂建模和仿真功能,可与控制系统的设计相连,有助于评估和验证控制策略。Simcenter Prescan 是一款基于物理场的仿真平台,可用于对复杂的交通场景和 ADAS/AV 传感器技术进行仿真,如雷达、激光雷达、超声波和摄像头。Simcenter Prescan 还可用于设计和评估 V2V 和车辆到基础设施 (V2I) 之间的通信应用。一个侧重于车辆动力学,另一个侧重于外部环境,这两款仿真框架相辅相成,为自动驾驶功能的虚拟验证和确认奠定了基础。
协同仿真结构如图 1 所示。此工具集提供了一款功能强大且简单易用的开放式系统建模和分析平台,其中的脚本功能能够以更高抽象级别的语言(Matlab. 环境、Python 等)进行应用程序编程。因此,该平台可以轻松与规划和控制算法集成,以用于前端加载测试。在这种情况下,使用提议框架的 ADAS 开发主要分为三个步骤。首先,利用 ADAS 应用和 Simcenter Amesim车辆动力学的路况数据开发算法。在这一阶段,可以进一步进行建模、试验设计 (DOE) 并对以车辆为中心的配置(底盘、动力系统、制动模型等)进行优化。其次,利用 Simcenter Prescan 交通和传感器仿真模型对所设计的算法进行验证。场景和性能要求主要遵循行业标准、现实条件或极端情况。在每个 ADAS 应用场合中,研究如何构建协同仿真配置并交换变量(车辆、传感器、环境和控制器模型变量)。第三,根据系统需求评估结果;例如,安全性、舒适性、自然驾驶和生态学性能。通过协同仿真设置,用户能够测试模型的所有方面、验证传感器精度并改善可视化效果。与物理原型测试相比,使用仿真的主要优势在于重复性高、边际成本低且模型参数易于更改。
值得一提的是,业界和学术界已针对建模系统工程(MBSE) 开发,对多物理场建模软件 Simcenter Amesim开展了广泛的调查研究。例如,Wissel 等人(2016)2 应用 Simcenter Amesim 开发了动力系统与 MPC 技术,同时 Vanhuyse 等人(2016)3 使用 Simcenter Amesim设计了混合动力车辆的非线性 MPC。尽管编创者并未考虑 Simcenter Amesim 在 ADAS 应用方面的优势,但他们集成了 Simcenter Prescan 等环境和传感器建模软件。其发表的论文结构如下:第 1 部分介绍了协同仿真中使用的主要技术,其中提供了协同仿真框架中所用软件和算法的详细技术信息:Simcenter Amesim、SimcenterPrescan、规划和控制设计以及协同仿真设置。第 2 部分介绍了自适应巡航控制 (ACC)、绿波技术和自动泊车。最后,第 3 部分给出了我们的结论。
技术
本部分介绍了协同仿真中使用的主要技术。
1.1 车辆动力学
Simcenter Amesim 是一款多物理场仿真平台,提供了流体、热、机械、机电和动力系统等物理领域的资源库。本研究将使用这一平台对车辆及其动力学性能进行仿真,以便测试 ADAS/AV 规划和控制算法。实际上,该软件可用于处理各种物理场,这也使其成为汽车行业内一款非常有效的集成式解决方案。丰富的资源库可以显著加快建模速度。例如,在设计大灯角度控制器时,发动机的动力学性能无关紧要。在这种情况下,可以使用简单的预制发动机缸体。借助这一方法,用户可避免在非关键组件建模上浪费时间,同时最大限度地缩短计算时间。通过连接不同的模块,可以轻松地构建复杂且逼真的模型,从而进行系统级仿真。另一方面,也可以对单个组件进行详细仿真。图 3 显示了我们使用案例中所使用的完整车辆底盘模型,其中包括动力系统、制动、悬架和转向组件。
1.2 环境
Simcenter Prescan 已广泛应用于汽车行业内的 ADAS和自动驾驶系统开发。它提供了直观的图形用户界面(GUI),具有广泛的环境建模功能,可帮助用户构建和修改各种交通场景,包括路段、基础设施组件(建筑物、交通标志)、参与者(汽车、卡车、骑行者、行人)、天气状况(雨、雪、雾)和光源(阳光、大灯、灯柱)。该产品还可以为车辆模型配备基于物理场的ADAS 传感器,以用于感测雷达、激光雷达、摄像头、超声波、全球定位系统 (GPS) 和天线等虚拟环境。ADAS 系统旨在解读环境并采取相应措施来减少驾驶员的工作量。开发这一系统的关键在于如何逼真地对环境和传感器进行仿真。此时 Simcenter Prescan 便可大显身手,这要得益于其先进的可视化功能。强大的可视化功能具有双重优势。首先,它能够帮助工程师开发全新 ADAS 系统功能。其次,良好的可视化效果有助于向管理层和客户汇 工作进度。图 1 中的环境模块提供了 Simcenter Prescan 可视化视频的屏幕截图。

图 3:Simcenter Amesim 车辆底盘动力学仿真。
1.3 规划
规划设计因具体的 ADAS 应用而异。例如,在 ACC 中,规划算法会生成参考速度和转向曲线,以便与前车保持安全距离。这一功能在高速公路上高速行驶时十分常用,因此计算必须足够快速,并且必须考虑车辆动力学分析情况,因为车辆特定的行为会显著影响最终轨迹。绿波技术通常用于直道/车道行驶情况,此时汽车会通过V2X 通信从交通灯基础设施接收参考速度。规划算法主要从基础设施方面实施,在车辆端作用不大。进行自动泊车时,汽车将以低速行驶;因此,规划计算时间不如在高速公路上行驶时那般重要。然而,停车场通常空间有限,并且障碍物种类较多(其他汽车、行人、物体等)且可能来自四面八方。在某些情况下,需要换挡(前进挡/倒退挡)和转向时,任务难度将进一步增加。规划算法需要在设计中将所有因素考虑在内。通常,在我们的使用案例中,规划阶段主要分为两步:
全局规划:以较高级别规划路线(或途经点)。这适用于泊车使用案例,其中全局规划算法需要基于最短路径等标准粗略地生成从起点到目标停车场的路径。
局部规划:根据全局规划算法提供的参考路径(或途经点),车辆将规划自己的详细轨迹,包括时间表。但是,车辆无需分毫不差地遵循预定路径,因为以下要求更为关键:
-
车辆约束,其中包括非完整约束(例如,车辆无法更改为其他配置)、转向、速度和加速度约束
-
避开障碍:在沿预计算路径行驶时,会遇到意外的障碍(例如,行人、其他行驶的汽车等)。因此,局部规划是一个在线规划阶段
-
在时间或油耗等给定标准下的最优性
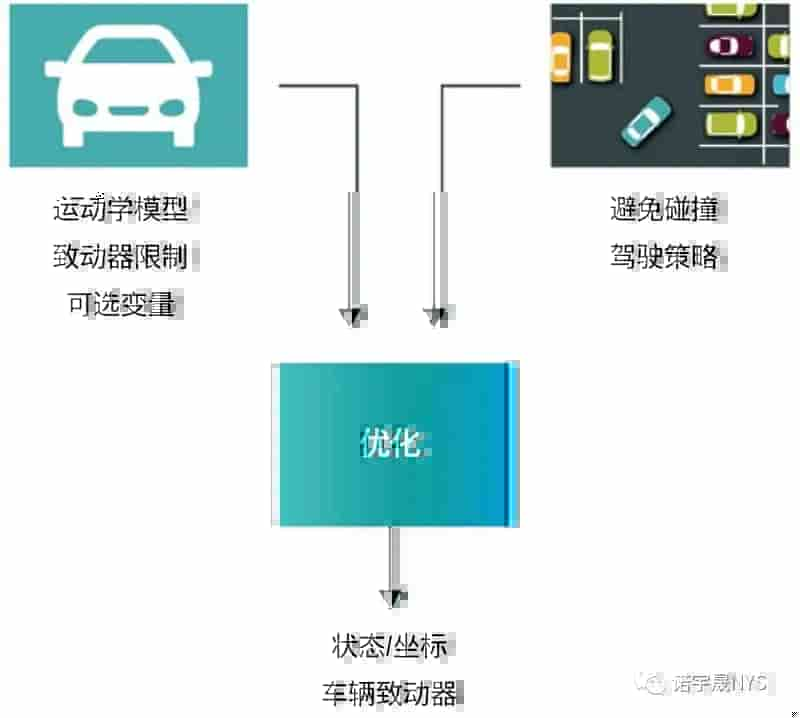
图 4:局部规划结构。
图 4 展示了自动泊车应用中使用的局部规划结构。请注意,在其他 ADAS 系统中可能还存在另一层规划;例如,交通规划算法决定变道或超车,但这不是本使用案例的重点。
1.4 跟踪控制
控制器用于按照计算的轨迹控制车辆。出于种种不确定性原因,控制器变得至关重要,而工厂模型不匹配和对车辆的干扰是其中两大典型原因。比例-积分-微分 (PID)控制已成为比较基准。PID 控制器不仅可轻松实现,而且具有易于理解的特性。实际上,从数学角度而言,PID 十分简单,而黑盒型控制(无需建模)使其成为工业应用中广泛使用的实用工具。
控制设计的重点在于模型预测控制算法的开发,以便在各种运行条件下提供最佳控制。MPC 设计依赖于基于模型的优化问题的解决;与 PID 控制相比,这种设计具有两大显著优势:它可以高效处理多输入多输出 (MIMO)系统和车辆系统约束。汽车行业正在积极研究 MPC 的应用,因为其算法、实现和调整都非常高效,而且基于MPC 的虚拟传感器拥有巨大潜力。
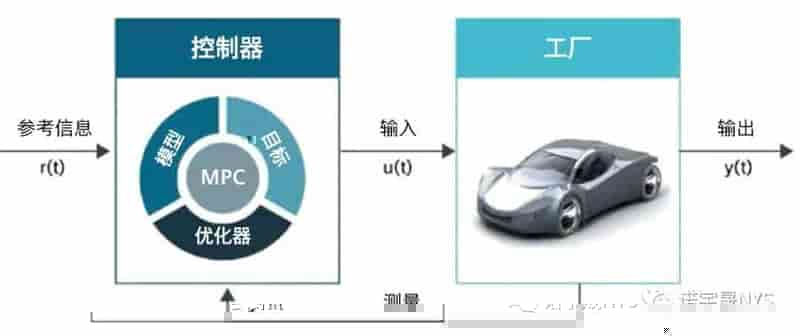
图 5:模型预测控制结构。
1.5 协同仿真结构
在本部分中,协同仿真结构整合了之前所述的技术。
1.5.1 路况设计
第一个调整步骤在 Simcenter Amesim 的路况仿真环境中执行。为了能够调整控制器以获得最佳性能,需要进行客观的性能测量并据此进行调整。在这一阶段,无需考虑传感器动力学以及环境对测量信 的影响。Simcenter Amesim 求解器可运行车辆模型,在该模型中可以使用所有 Simcenter Amesim 相关功能,并且模型变量易于访问。其主要目标在于正确设置控制器的动力学特性,使控制器在理想情况下良好运行。控制器可以使用 Simcenter Amesim 开发,也可以通过其他环境(例如 Matlab. 环境、Python)开发。
1.5.2 协同仿真设置
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!