ROS和Android配合使用非常有趣,这里推荐,ROSClinet,使用rosbridge让android和ROS通信:
具体参考奥斯卡的个人剧场:http://xxhong.net/
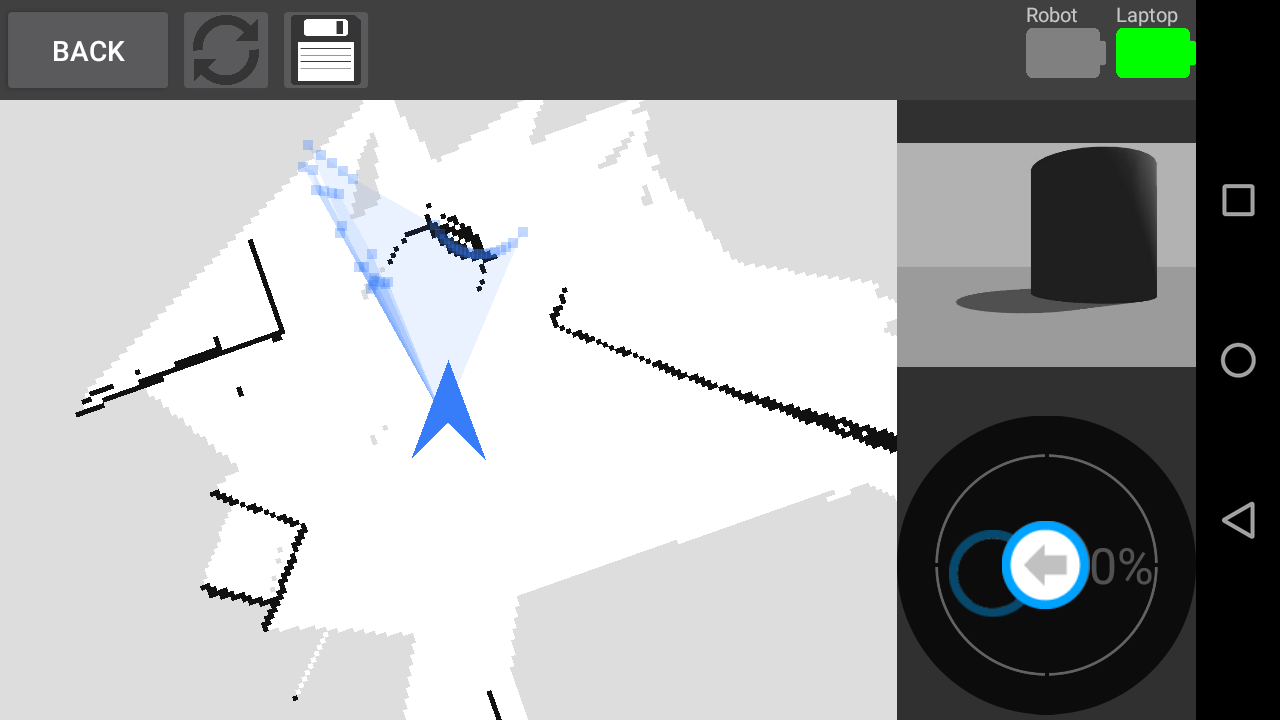
turtlebot示例非常全面,也给出了Android的Apk,今天尝试一下。实际机器人已测。
考虑到通用性,这里选用仿真环境:
然后启动手机应用进行连接,注意ROS_IP等一些环境配置:

其他功能比如全景,跟随等,一样不多说。
这里补充非常重要的参考资料,对于系统学习ROS非常有帮助:
1. turtlebot
2. rocon
rocon
概观
该rocon框架是一套工具和模块可以一起使用,以在上面提供高水平的服务运行一个自定义的多主机系统的活性氧。它不会尝试,并确定什么样的服务来运行1,也不会尝试朝云机器人伸出太积极。把它看成是一个集中的工作场所,你可以处理为多机器人装置系统收到的信息和本地指令2。
而不是在一次照亮整个音乐会,该指南将通过模块,其中许多可以独立使用行走。这应该有助于突出像任何好的高潮演唱会的功能。
入门
安装
-
安装
安装完成rocon环境。
独立的工具
Rocon启动
该rocon_launch工具是用于启动每个多roslaunch实例自己的终端的便利工具。
-
Rocon启动单大师
产生多个roslaunch终端有一个主器件的工作。
Rocon主信息
我们倾向于发布关于我们的ROS大师(名称,描述,图标)的一些基本信息。这通常是音乐会remocons(后下)的利益,但实际上可以为其想提供一些信息,为客户内省的任何独立ROS大师完成。
-
出版信息大师
提供有关您ROS主数据向希望内省的客户。
独立概念
以下概念提供了一个简单的介绍到一些正在和周围的rocon框架使用的更根本的东西。
Rocon的URI
Rocon通用资源标志符字符串键描述各种实体(机器人,remocons),这对他们的运行,使我们能够在更高层次上形成对这些资源的请求,以及其分配兼容的应用程序。
你会经常看到这些在各种消息的ROS API级别飞散各地。有关这些字符串的信息被埋没的狮身人面像文档中rocon_uri包。
-
概观
-
规格 -详细介绍了如何一个rocon_uri串可以或可以不进行组装。
-
规则 -你可以在rocon URI字符串使用有效的字段列表。
-
用法 -蟒蛇API和示例。
人际交往
关于
该rocon_interactions包提供用于建立人类用户,并正在运行的ROS主站系统之间的相互作用的框架。基本上,它解决的问题,我跑什么,我该如何配置呢/span>。寻找合适的发射运行,或设立rviz会话都是很好的例子-用户应该不需要从头开始四处找出运行或在哪里可以找到的文档。随着roco
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!