https://journals.plos.org/ploscompbiol/article=10.1371/journal.pcbi.1004586
摘要:
在基于结构的药物设计中,类药物分子与受体的自动对接是一个必不可少的工具。虽然对受体的灵活性进行建模对于正-确预测配体结合很重要,但仍然具有挑战性。这项工作的重点是一种方法,在这种方法中,通过显式地预先指定一组受体侧链来模拟受体的灵活性。这种方法的挑战包括:1)搜索空间呈指数增长,需要更高效的搜索方法;2)假阳性数量增加,需要为灵活的受体对接定制评分功能。我们介绍了AutoDockFR–AutoDock for Flexible Receptor(ADFR),这是一种基于AutoDock4评分功能的新型对接引擎,它通过一种新的遗传算法(GA)和定制评分功能解决了上述挑战。我们使用Astex多样集验证ADFR,证明其GA的效率和可靠性比AutoDock4中实现的GA提高。我们证明,当配体与需要侧链构象变化的载脂蛋白受体交叉对接时,成功率大大提高。这些交叉对接实验基于两个数据集:1)SEQ17——一个包含17对apo holo结构的受体多样性集;2)CDK2–由一个CDK2载脂蛋白结构和52个已知结合抑制剂组成的配体多样性集。我们表明,当将配体交叉对接到具有多达14条柔性侧链的受体的载脂蛋白构象中时,ADFR在两个数据集上 告的交叉对接配体比AutoDock Vina更正确,在SEQ17上发现的解决方案分别为70.6%和35.3%,在CDK2上发现的解决方案分别为76.9%和61.5%。ADFR在这两个数据集的顶级解决方案数量上也优于AutoDock Vina。此外,我们还表明,在holo复合物中,正确对接的CDK2复合物在配体和移动受体原子之间平均重新产生了79.8%的成对原子相互作用。最后,我们证明了降低受体内能的权重可以提高正确对接姿势的排名,并且当增加侧链灵活性时,AutoDockFR的运行时间可以线性扩展
对接程序被广泛用于识别与特定受体相互作用以抑制其功能的类药物分子。虽然已知受体在配体结合时改变构象,但大多数对接程序将小分子建模为柔性,而将受体建模为刚性,从而限制了可应用对接的治疗靶点范围。在这里,我们介绍了一个新的对接程序AutoDockFR,它通过允许大量明确指定的受体侧链探索其构象空间来模拟部分受体灵活性,同时为给定配体寻找能量有利的结合姿势。我们表明,通过在不存在配体(即载脂蛋白构象)的情况下,在实验确定的受体构象结合位点中加入受体灵活性,我们实现了更高的对接成功率。以前的方法基于对被认为是柔性的受体部分的先验和明确说明,迄今为止仅限于少量柔性蛋白质侧链(2-5),因此需要事先了解受体侧链在与给定配体结合时发生构象变化的情况。AutoDockFR在识别多达14个柔性受体侧链问题的正确解决方案方面的能力降低了这一要求。
介绍:
方法:
解空间的聚焦采样
ADFR计算过程中探索的解空间非常大,减少基因组中任何变量的范围有助于搜索。在ADFR中,我们应用这一原理,将配体翻译的采样减少到更可能产生良好对接姿势的翻译子空间,从而消除已知的配体翻译,使其位于受体内部,或距离受体太近或太远。同样,所谓的“软转子流量计”(见下文)允许ADFR对受体侧链构象进行取样,类似于更频繁地在晶体结构中观察到的构象
平移点:在ADFR中,通过将配体的中心原子(称为根原子)转移到对接盒内的一个点,将配体放入受体中。对于GA中给定的对接解决方案,该翻译存储在配体翻译基因中。当创建初始群体时,群体中个体的翻译基因从一组 格点(即翻译点)中选择。通过分析碳亲和力图谱并选择亲和力为-0.3 kcal/mol或更好的位于受体体积之外的所有点来定义翻译点(图4A)。通过分析Astex多样性集合[33]中85个配合物的 格图,使用以配体几何中心为中心的尺寸为26.6?的立方体盒,确定了-0.3 kcal/mol的亲和截止值的最佳值。该分析表明,向下采样平移点至1.125?间距(即默认 格图间距的三倍)和亲和力小于或等于-0.3 kcal/mol的过滤点提供了结合配体中根原子覆盖率和平移点数量减少之间的最佳权衡(见图4B)。更严格的亲和性截止值将进一步减少点数,但会降低覆盖率。该方案从最初的357911个总转换点中平均产生470个转换点(最小值:60,最大值: 格点(713)对应于99.87%的平均折减系数。有趣的是,平移点的数量与对接盒中可触及受体表面积的分数成比例,而不是与盒的体积成比例。因此,对于更大的对接盒,例如用于盲对接实验的对接盒,其折减系数更为显著,其中实际结合区域未知,对接盒包含整个蛋白质结构[34–36]。当配体翻译被减少到初始群体中的一组离散点时,最小值可以自由修改翻译值,从而实现离 翻译。
图5 Astex多样化集合重新对接 A) 条形图描述了ADFR和AD2发现的最低能量溶液之间的能量差异。5M(暗)、ADFR和AD25M(亮)。负值表示ADFR解决方案的低能量。仅显示两个差值至少有一个大于0.5 kcal/mol的配合物。1R1H是ADFR发现的唯一比AutoDock更好的解决方案(即差值>2 kcal/mol)的复合物
交叉对接实验
AutoDock有32个可旋转键的硬编码上限,防止在用于灵活交叉对接的两个数据集上与ADFR进行直接比较。此外,已知在AutoDock中实现的遗传算法对于超过20个可旋转键的问题会失去效率。AutoDock Vina对其可以搜索的可旋转键的数量没有实现限制,并且它使用了与ADFR相同的柔性侧链的显式表示,最后,它在高维搜索方面比AutoDock具有更好的性能。因此,它为比较柔性配体与具有明确指定柔性侧链的受体对接的成功率提供了很好的参考。对于全息重对接,配体原子的实验结构和对接结构之间的RMSD值为2.0?被广泛接受,用于识别正确对接的姿势。当将配体对接到载脂蛋白结构中时,配体的参考位置是通过叠加holo和载脂蛋白受体结构获得的。排列受两种受体构象之间的差异以及用于叠加的原子子集的影响。为了减少这些近似值,我们在apo交叉对接实验和分析中将RMSD截止值放宽至2.5?。因此,溶液的秩为1表示最低能量溶液的RMSD小于2.5?RMSD,而秩为N(N>1)表示 告了N-1个假阳性溶液
SEQ17数据集 表1总结了SEQ17交叉对接结果。对于刚性交叉对接,AutoDock Vina 告了一个系统的正确解决方案:(1IKG)和两个系统的ADFR(1IT8和1Z6P)。1IT8的载脂蛋白构象中的结合袋允许其小刚性配体(RMSD 1.26?)的翻译,这足以解决配体中的嘧啶部分与Phe229侧链之间的冲突。1Z6P配体的硝基苯甲酰基和邻苯二甲酸部分分别与Arg193和Arg310的氨基发生严重冲突。通过旋转这些基团产生1.86?的配体RMSD,这些冲突可以在受体载脂蛋白构象的结合口袋中解决。当与柔性受体侧链对接时,排名从9提高到2。1IKG的配体通过AutoDock Vina正确对接,与Ser62的羟基氧发生严重冲突,并且非常接近Thr301主链羰基氧。AutoDock Vina通过旋转和翻译肽为配体找到解决方案(等级3,RMSD为2.27?)在配体中键合以避免冲突,并在侧链变软时使其成为RMSD 2.45?的1级溶液。当在载脂蛋白构象中与配体相互作用的侧链变得灵活时,两种方案的成功率都明显提高。AutoDock Vina找到了4个排名靠前的解决方案(23.5%),ADFR找到了5个(29.4%)。AutoDock Vina 告了另外两种解决方案,排名第4和第6,共有6种受体(35.3%)。ADFR 告了另外4个系统的排名为2和3(52.9%),另外3个系统的解决方案排名为14(70.6%)。表1还提供了ADFR和AutoDock Vina的最佳正确解决方案和最佳错误解决方案(Δ分数)之间 告分数的差异。这些差异为解决方案的排名提供了一定程度的可信度。一个小的Δ分数表示存在一个能量非常接近的替代姿势。
如果这一差异低于评分函数的内在误差,那么这两种解决方案是无法区分的,它们的相对排名也无法提供信息。另一方面,较大的Δ分数表明排名信息更丰富。考虑到排名前十的解决方案,ADFR成功率为52.9%,AutoDock Vina成功率为35.3%。支持信息(S4表)中提供了最佳评分配体姿势的RMSD值,以及最佳评分溶液和最低能量正确对接溶液(如果不同)的RMSD值
表1:SEQ17与受体侧链交叉对接形成载脂蛋白构象
CDK2.我们将来自CDK2数据集的52个配体交叉对接到载脂蛋白结构中,该结构具有不同程度的受体柔性,从0到12个柔性侧链不等。交叉对接结果总结在表2中。该表显示了排名靠前的解决方案(排名1)正确的复合物百分比,以及排名靠前的十个解决方案中正确解决方案的系统百分比。ADFR在所有测试中都优于AutoDock Vina。在刚性交叉对接中,相对较少的自由度(7到20之间)不太可能是AutoDock Vina性能较低的原因。因此,更好的ADFR结果表明,与AutoDock Vina中实现的功能相比,AutoDock评分功能可能对口袋形状中的小扰动不太敏感。随着结合位点受体灵活性的增加,两个程序的整体对接性能都有所提高。所有柔性侧链组(FS4、FS10和FS12)的结果表明,使用“最佳排名”和“前10名结果”指标,ADFR始终获得更好的成功率。支持信息(S5表)中提供了最佳得分姿势和最佳得分正确对接姿势(如果不同)的RMSD值。AutoDock Vina耗尽性的增加并未显示出成功率的改善,在某些情况下,结果甚至更糟。
效率和复杂性考虑:与AutoDock不同,AutoDock Vina使用的评分功能与ADFR不同。此外,它没有 告该评分功能的评估次数,因此无法在效率方面进行直接比较。在XEON-EMT处理器上,在单核上与12个柔性受体侧链对接的平均壁时间为:AutoDock Vina的耗竭性为8,平均壁时间为1.85小时;Python实现ADFR的平均壁时间为8.5小时。AutoDock Vina的运行时间随着RCD、FCD4、FCD10和FCD12的柔性受体侧链数量的增加而呈指数增长,平均时间分别为1.8、13.0、61.2和111.3分钟。另一方面,对于FCD4、FCD10和FCD12,ADFR的运行时间从RCD的平均4.2小时线性增加到每个GA进化的4.8、7.3和8.6小时。图6显示了两个程序的柔性对接运行时间(FS4、FS10和FS12)与刚性对接运行时间的比率,使用在52个系统上计算的平均运行时间。使用带有默认搜索设置(Vina8)的AutoDock Vina,对接到带有12条柔性侧链的接收器所需的时间是对接到刚性接收器所需时间的60多倍。更高的耗竭性设置Vina20和Vina200将运行时间分别比默认的Vina8增加了2倍和20倍以上(支持信息–S7表)。另一方面,具有12条柔性侧链的ADFR运行时间仅为刚性对接运行时间的两倍。
受体侧链运动:每个柔性受体侧链在输入结构的构象中开始对接(即交叉对接中的载脂蛋白构象)。这种构象在对接过程中由变异算子和局部搜索过程进行修改。突变使用χ角和转子流量计库的偏差。另一方面,局部搜索程序可以自由地修改这些χ角。柔性受体侧链的子集也可以通过交叉操作在个体之间交换。我们分析了在FS12对接运行期间通过遗传算法优化的所有种群,以深入了解在进化过程中改变轮状体状态的侧链数量。如果侧链的至少一个χ角偏离输入结构至少50°,则认为侧链构象发生了变化。该值对应于ADFR使用的转子流量计库中χ角的最小差异。对所有52个复合体的所有50次运行中所有世代的数据进行分析,揭示了GA的一个有趣的涌现特性。虽然可以看到最多12个修饰侧链的个体,但非常罕见,但每个个体的平均修饰侧链数为5.6(共12个)。图7显示了GA连续世代中修饰侧链数量的典型分布。该图显示,该数量从0(在初始种群中)快速上升到平台。这一行为与Gaudreault及其同事[39]的分析一致,他们的分析 告称,只有5条或更少的侧链在配体结合时在60°角截止范围内改变了它们的旋转体构象
柔性受体侧链与配体的相互作用。虽然我们的交叉对接实验成功的衡量标准是相对于叠加到载脂蛋白结构上的近似配体的配体原子RMSD,但了解柔性受体侧链在结合配体时如何改变构象也很重要。图8提供了apo结构(4EK3)、holo复合物(1YKR)和最佳对接溶液(具有12条柔性侧链的apo受体)之间受体构象变化的示例。图8A显示,apo和holo结构之间的Cα位置没有显著偏差。 载脂蛋白构象中的Lys33和Lys89与完整构象中的配体严重冲突,从而阻止其成功交叉对接到刚性载脂蛋白受体(最佳能量溶液的RMSD值为5.96?)。此外,Asp132和Glu85被翻转,而剩余的侧链在配体结合时保留其载脂蛋白构象。图8B显示了载脂蛋白结构中的对接配体。所有柔性侧链都已调整位置。特别是,这两种赖氨酸的构象更接近其全构象,从而使配体能够与0.34?的RMSD结合。图8C显示了与holo复合体对接的解决方案。这两种赖氨酸已接近其完整构象。Gln85构象的差异可能是因为在X射线结构中,氧和氮的电子密度的相似性限制了Asn和Gln的酰胺基分配正确侧链方向的能力。在对接溶液中,由于Gln85与Lys89的相互作用(或缺乏相互作用),Gln85在holo和apo结构之间翻转其氨基。此外,Gln85的胺基在全息结构中与水分子形成氢键。在对接溶液中,尽管Lys89更接近其全构象,但该侧链仍保持接近其载脂蛋白构象,并与配体磺酸基相互作用形成氢键。因此,Gln85采用的构象可能是由于受体能量项的权重降低,以及对接过程中缺少明确的水分子。下面描述了一组成功交叉对接溶液中侧链与配体相互作用的更详细分析。
在再现全息相互作用模式方面的一些失败可归因于apo和全息之间的主链原子偏差。Ile10、Val18和Lys33的偏差值最高(约2?)。Lys33和Ile10的侧链具有足够的灵活性来适应这种变化。另一方面,Val18只有一个χ角,使两个碳原子在一个平行于包含配体原子的平面上旋转。因此,Val18上的侧链柔性无法补偿骨架从载脂蛋白结构中观察到的配体转移。
对于45.1%的移动侧链(穿过43个复合体),在全息复合体中观察到的所有相互作用都以对接姿势再现,89.7%的侧链至少再现他们一半的全息互动。在holo结构中,11.2%不与配体接触的受体侧链与配体(灰细胞)产生至少一次相互作用。对接溶液中的大多数额外相互作用由Lys33(14)、Gln85(16)和Asn132(32)解释。对于这些侧链,与配体弱相互作用的益处大于这些侧链在载脂蛋白构象中产生的缩小的受体-受体相互作用
讨论
自3.05版以来,AutoDock可以明确处理柔性受体侧链,但已知其GA在少于20个键可旋转时表现最佳,有效地将此选项限制为1到2个柔性侧链。将柔性配体重新对接到Astex多样性集合中,可以定量评估ADFR中实现的新GA与AutoDock中实现的新GA之间的差异,从而提高效率和可靠性。这种性能的提高是通过以下技术的组合实现的:群体聚类、有效的终止标准,以及知识的编码,如平移点和软转子流量计,帮助遗传算法更快地识别好的解决方案。其他对接软件(如Gold,Fitted)使用类似于平移点和转子流量计的技术来修剪搜索空间。然而,在ADFR中,该信息用于更频繁地对搜索空间中有希望的区域进行采样,同时保留对整个搜索空间的连续采样,而不是对其进行修剪。我们在两个数据集上进行了交叉对接实验。SEQ17数据集关注受体多样性,而CDK2关注配体多样性。这两种情况都是相关的对接场景,选择载脂蛋白构象作为目标提供了与诱导拟合模拟相关的挑战的现实场景
SEQ17数据集由17个受体组成,其中apo构象中的大量侧链运动对于对接配体是必要的。在受体的刚性载脂蛋白构象中观察到的大量失败的交叉对接证实了SEQ17提供了一组具有挑战性的复合物。交叉对接实验表明,增加受体的灵活性可以提高对接成功率。ADFR 告了70.6%的络合物溶液,52.3%的络合物溶液的等级低于10,优于AutoDock Vina 35.3%的成功率。对评分函数的改进可以进一步提高ADFR未来的对接成功率。特别是,在柔性受体侧链中添加可旋转的末端氢原子将提高该数据集上的对接精度,因为大量移动的受体侧链包含此类氢原子
CDK2数据集的交叉对接显示,ADFR的成功率更高,与AutoDock Vina相比有了实质性的改进。这种对接方案不同于SEQ17数据集,因为我们使用一组52个配体对接到受体的单一载脂蛋白构象中。我们表明,当我们以CDK2载脂蛋白受体的构象与0、4、10和12个柔性侧链交叉对接52个CDK2配体时,ADFR在柔性对接的所有情况下都优于AutoDock Vina。我们对受体侧链运动以及增加受体灵活性对对接成功率的影响进行了详细分析
受体侧链运动分析
移动受体原子的RMSD不是了解受体侧链运动的合适指标,原因如下。首先,在许多情况下,包括这里使用的SEQ17和CDK2数据集,只有一小部分与配体相互作用的受体侧链的构象发生了实质性变化。这些侧链对移动受体原子的RMSD的贡献超过了大量侧链保持接近其初始构象的贡献。第二,计算RMSD需要参考构象,这是成功实现的目标构象。理想情况下,当配体对接成载脂蛋白构象时,应诱导全构象。然而,这需要受体具有充分的灵活性。在我们的实验中,只有与配体相互作用的侧链才能移动。这些侧链存在于载脂蛋白构象中;因此,并不总是期望它们实现全息构象。例如,没有与特定配体相互作用的侧链没有理由偏离它们的载脂蛋白构象。此外,即使是很小的骨架扰动也可能改变Cα-Cβ载体,从而潜在地迫使侧链采用替代构象与配体相互作用。基于这些原因,我们使用holo复合物中配体和移动受体原子之间的成对原子相互作用来评估受体侧链的运动。结果表明,平均79.8%的这些原子成对相互作用在对接溶液中恢复,表明柔性受体侧链移动以重新创建在holo复合物中观察到的相互作用模式
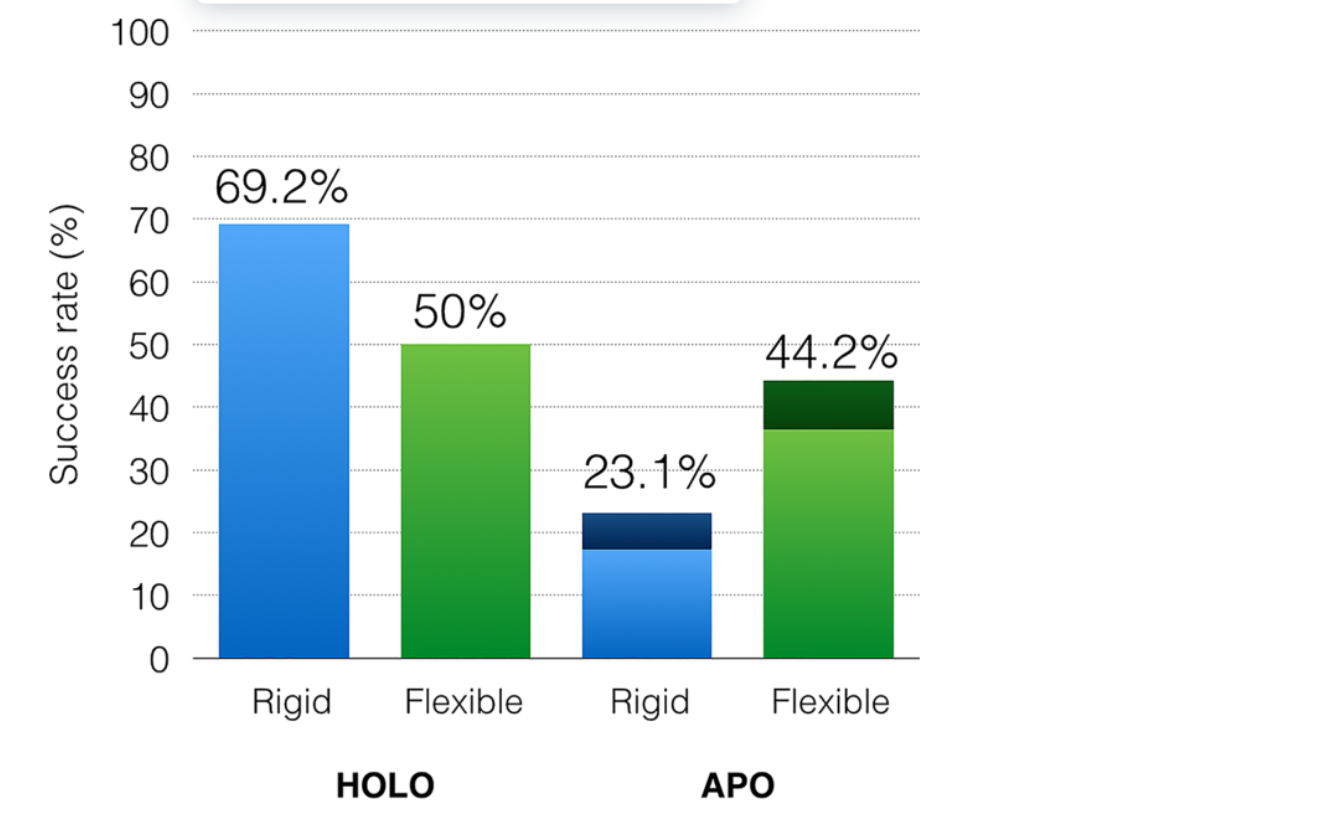

图11当配体与天然holo受体和apo受体对接时,使12个受体侧链具有柔性的影响。当使原生holo受体具有灵活性时,观察到预期的准确性损失,这反映了评分功能和搜索方法的缺陷。然而,增加载脂蛋白受体的灵活性可以提高对接成功率。显示配体RMSD
增加受体灵活性对对接成功率的影响
图11显示了ADFR在刚性对接到载脂蛋白和载脂蛋白结构并带有12个柔性侧链时实现的成功率(即顶级溶液的晶体结构RMSD小于2?(holo)和2.5?(apo))的CDK2络合物百分比)。在将配体对接到刚性天然holo受体(69.2%)与将其对接到具有柔性侧链(50%)的同一受体之间,可以观察到预期的性能下降。这可归因于模型的缺陷(例如,隐式溶剂、评分函数限制),导致误 超过正确的解决方案评分。然而,在apo结构中加入柔性侧链可以显著改善对接配体的结果,将成功率从23%提高到44%
方法开发的开放式体系结构。ADFR的开放式体系结构旨在整合各种运动对象,我们正在为局部和全局运动添加运动操作符。这种体系结构支持探索新技术,但python实现在执行时间上表现不佳。ADFR的当前实现比在具有12个柔性侧链的受体中对接时的AutoDok VINA的高度优化的C++代码的平均速度慢230倍。目前,一个GA进化过程平均需要8.5个小时,用于具有12个柔性侧链的受体。因此,此时,ADFR仅适用于能够访问大量计算资源(即大型集群)的用户,以便在不同的处理器上并行执行独立的GA进化。我们正在研究一种C++实现,它将极大地减少执行时间。
文章知识点与官方知识档案匹配,可进一步学习相关知识Python入门技能树首页概览212705 人正在系统学习中
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!