

简介
Boston Consulting Group最近的一项研究指出,到2030 年,在美国车辆总行驶里程中,近 25% 可能是由共享自动驾驶电动车辆贡献的 。在汽车制造商推出的或正在进行车队运行测试的自动驾驶汽车中,大部分采用电动动力系统(不是纯电动,就是混合动力)。电动动力系统因具有更高的燃油效率和更低的 CO 2排放而成为自动驾驶汽车不可或缺的一部分。它是一种更简单的支持自动驾驶车辆所需电子线控系统的平台。另外,随着电池价格持续大幅下滑,电动汽车成为一种颇具吸引力的选择,因为其拥有和维护成本更低,特别是对于汽车共乘生态系统中的车队所有者而言。
到 2030 年,在美国车辆总行驶里程中,近 25% 可能是由共享自动驾驶电动车辆贡献的……
自动驾驶对电动车辆行驶里程的影响
与标准驾驶车辆相比,完全自动驾驶汽车(L5 级)将拥有更多电子设备(传感器、传感器融合箱、电子线控系统 ECU)。采用全电动动力系统时,这些支持自动驾驶 功能的电子设备需要由高压电池通过 12 V 线路 DC-DC 转换器供电。这种增加的负担会减少电动车辆行驶里程,因而对自动驾驶电动车辆的开发者造成严峻挑战。另一方面,与人类驾驶行为相比,人们期望机器驾驶能实现更平稳的驾驶模式。更平稳的行驶工况可以更有效地利用电池能量,延长电动车辆行驶里程。如果对最终效果进行量化,这些折衷会变得更有意义!
我们可以查看的设计的第一部分是大量传感器和传感器融合箱的总功率需求如何影响总功耗,进而影响总行驶里程。为了量化不同级别自动驾驶的潜在影响以及未来对不同组件进行改进的潜力,有必要了解支持电子系统的自动驾驶功能的多种总功耗需求水平。图 1 显示了利用 Simcenter 系统仿真软件分析的自动驾驶系统不同功耗(和相关的热)水平造成的行驶里程减少情况。这个例子考虑的是一辆采用纯电动动力系统的紧凑型轿车。查看 2-4kW功率水平(这是当前道路上很多测试车辆的范围)对应的里程减少情况时,功耗最小化相关挑战变得很清楚。该分析进一步展示了使用低功耗集中式传感器融合架构的优势,例如,Mentor 的 DRS360. 有望将传感器融合箱的功耗限制在 100W。

图 1:用 Simcenter 系统仿真软件仿真得到的自动驾驶 (AD) 系统功率需求对电驱动里程的影响。
然而,自动驾驶对行驶里程也有潜在的益处。以一辆具有 30 个传感器(激光雷达、雷达、摄像头)和一个传感器融合箱的 L5 级自动驾驶电动式紧凑型轿车为例,其总负载为 1kW。互联自动驾驶车辆的行驶工况曲线会如何改变尚不可知,这是一个很活跃的研究领域。有自动驾驶车队在道路上开展路测的汽车原始设备制造商可能会获得有关其车辆平稳行驶工况的信息。另一方面,随着汽车原始设备制造商越来越依赖虚拟交通场景和车辆驾驶仿真进行自动驾驶车辆测试,Simcenter Prescan.等仿真工具及其与 DRS360.的连接可用来确定从机器驾驶预期会获得的行驶工况曲线平稳度。

图 2:由人类驾驶转为机器驾驶时驾驶行为的代表性变化。
对于此例,我们将使用德克萨斯大学奥斯汀分校的Kockelman 博士团队所开展研究 2 中讨论的两种仿真行驶工况平稳度场景。场景 1(图 2)反映整个周期中行驶工况曲线平稳度为中等,在完全停止和加速时表现得尤其明显。场景 2 反映平稳度显著提高,以至于互联自动驾驶车辆在城市行驶期间可以预测即将发生的停车,并相应地减速/加速而不会完全停止。这两种场景的整体通勤时间都没有变化。
对于在 25°C 环境条件下的城市行驶,以及针对此特定车辆研究,我们的分析显示(图 3):电子设备对主电池的功率需求增加导致行驶里程减少近 16%。如果使用更高功耗的传感器融合箱,行驶里程会减少得更多。场景 1 通过更好地为车轮分配电池能量而使电驱动里程增加 8%,但与 L0 级汽车相比,L4/5 级自动驾驶电动汽车的行驶里程仍只有 92%。场景 2 中显著提高的平稳度使得 L4/5 级自动驾驶汽车的行驶里程是 L0 级电动车辆的110%。
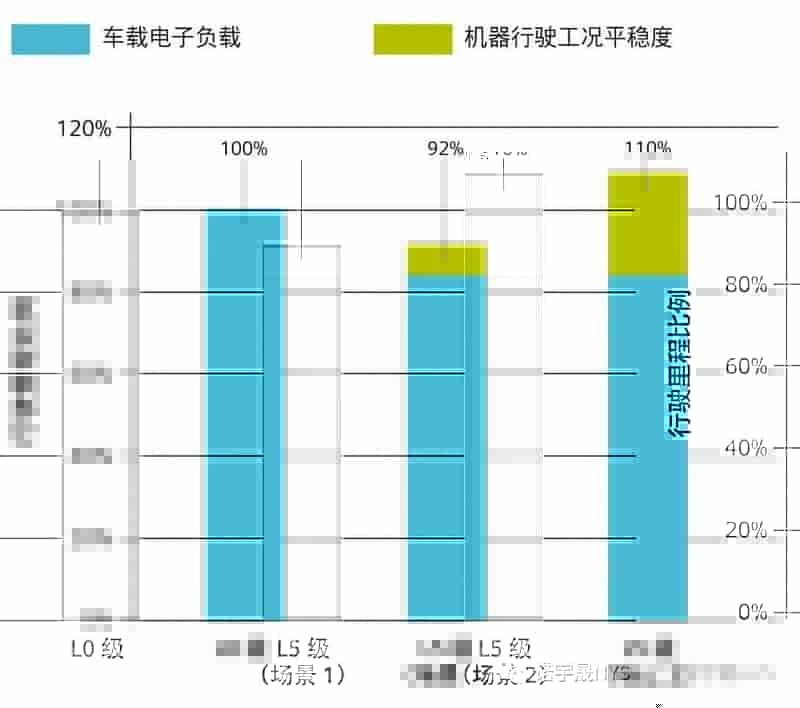
图 3:使用 Simcenter Flomaster 针对 L4/L5 级自动驾驶电动紧凑型轿车进行的能量和热管理仿真,考虑了车辆电子设备的增加和机器驾驶带来的潜在行驶工况平稳度。仿真是在 25°C 环境条件下针对城市行驶工况进行的。行驶工况平稳场景由 UT Austin 的 Kara Kockelman 博士提供。
此分析表明:电子设备总负载,尤其是传感器融合箱(它可能是自动驾驶系统中功耗最大的组件)的功率(和热负载),必须尽量降低。更重要的是,根据行驶工况曲线的变化以及制造商通过其机器学习算法所能实现的能力,电动动力系统的整体能效(例如电池设计)需要改进,或者电池组尺寸需要调整——二者均有助于降低成本。这些数据会有所变化,具体取决于动力系统(电池和电机设计)的特性、车辆尺寸、电子集成度、车辆 EE配置以及其他因素。但是,这里说明的电动动力系统优化的潜在机会仍然存在。
其他因素,例如车辆结队行驶,特别是卡车/商用车队高速公路行驶,可以进一步延长行驶里程,参见 NREL 3的研究,其中揭示了 8 级车辆结队行驶对燃油消耗的影响。这可以为调整电池和其他动力系统组件的尺寸提供额外的机会。
电动动力系统寿命和可靠性的影响
L4/L5 级自动驾驶电动汽车的一个主要应用是共乘车队,预计这类车辆每年可能行驶 80,000 英里或以上。作为参考,纽约出租车每年行驶里程约为 70,000 英里。这与当今的主导驾驶模式——汽车停放时间超过 80%——形成鲜明对比。对于当今电动车辆中的电池,除了循环使 用寿命(衡量连续充电和放电情况下电池老化的指标)之外,贮存寿命(衡量电池在某种电量和温度状态下存放时的老化情况的指标)对于确定电池整体寿命起着重要作用。对于共乘自动驾驶电动车辆,设计和表征电池时重点将更多地放在循环使用寿命上。利用 Siemens 电池仿真产品组合可以轻松评估新使用曲线对电池寿命的影响,对电池化学设计进行改进,以及实现专用于自动驾驶电动汽车的电池组和车辆集成。类似地,机器驾驶提供的更平稳行驶工况曲线可以显著降低电池、逆变器和电机的总热负载,为电动动力系统部件的热管理方案创新提供机会。例如,图 4显示了电动动力系统部件的发热变化,这可能会随着机器驾驶所实现的行驶工况平稳度而产生。对于图 2所示的行驶工况平稳化情况,行驶工况平稳化场景 1 和场景 2 分别使逆变器的整体发热量减少约 25% 和约 40%。温度是逆变器可靠性的主要指标,因此热负载的降低导致确保现场可靠性的热管理要求相应地降低。Simcenter 集成了针对逆变器热管理和寿命特性的测试与仿真工作流程4,让工程师可以评估新架构并准确估算自动驾驶电动汽车的逆变器寿命。分析表明,电池的总发热量也有类似程度的减少。行驶工况平稳度对电机整体发热量影响巨大,场景 1 中发热量降低约 30%,场景 2 中降低约 60%,原因是加速需求急剧减少。利用 Simcenter Motorsolve. 时,由于对热管理的要求可能会降低,这就给最大程度地减小电机总体积提供了机会,同时不会影响其性能或寿命。这些因素可以让原始设备制造商进一步降低电动动力系统的成本。

图 4:不同级别机器驾驶工况曲线下电池、逆变器和电机的发热比较。 结语
归根结底,增加电动动力系统和自动驾驶车辆是完全合理的,但二者的关系像任何其他合作关系一样,也有很多工作要做。
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!