一、两轮差速模型运动模型 公式,轨迹模拟
% 参考博客
% https://blog.csdn.net/bufengzj/article/details/103353238tm_medium=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.compare&depth_1-utm_source=distribute.pc_relevant_t0.none-task-blog-BlogCommendFromMachineLearnPai2-1.compare
% 两轮差速模型轨迹预测
clc;
clear;
vr = 0.3; % 右轮速
vl = 0.1; % 左轮速
angle = 0; %初始角度
L = 1.0; % 两个后轮的距离
p = [1 1];
for i=1:10
dentax = (vr+vl)*cos(angle)/2;
dentay = (vr+vl)*sin(angle)/2;
theta = (vr-vl)/L;
pos = [p(end,1)+dentax p(end,2)+dentay];
p =[p;pos];
angle = angle + theta;
end
%计算旋转中心转动半径 -1 1原地旋转
R = (L/2)*(vr + vl)/(vr-vl);
R
plot(p(:,1),p(:,2),‘.-r‘);
hold on;
axis equal;
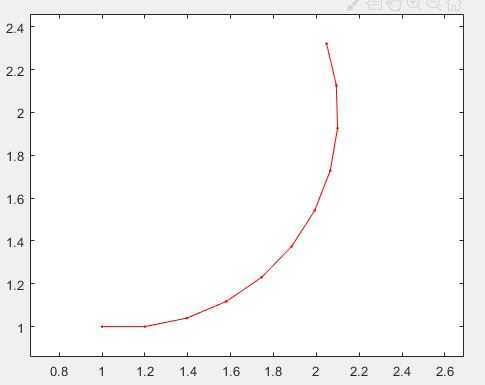
二、测试图

原文:https://www.cnblogs.com/wbscpp/p/13221319.html
相关资源:滚齿机速查挂轮软件2.1版本.zip_插齿机挂轮计算软件-制造文档类…
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!