先简单介绍一下下文有“长篇大论”
全文字数: 2.7万;图片: 68张;页数(A4): 80页;有原理图、程序流程图、程序源码等
【关键词】: 自动跟随;UWB定位;智能行李箱;分布式硬件;指纹解锁;智能称重;超距离 警;USB快充
【创新点】: 1. 在自动跟随系统的设计中,对定位技术和定位跟随方法进行了对比分析,建立了行李箱运动的数学模型,设计出了一套自动跟随方法;2. 在智能跟随行李箱功能的设计中,增加了指纹解锁、自动称重、超距离 警、USB双向快充四大功能;3. 提出了分布式控制系统硬件结构方案,以提高系统的实时性和可靠性。
【实现功能】: 1. 定位跟随:首先通过定位技术,确定行李箱与用户之间的相对位置,进而通过自动跟随算法,驱动箱体底部的动力电机,最终达到跟随效果。2. 自动避障:利用超声波、激光雷达等测距传感器识别障碍物,进而做出躲避抉择,通过驱动箱体底部的动力电机,最终达到避障效果。3. 指纹解锁:通过光电式或电容式指纹传感器进行指纹信息的采集和识别,以指纹解锁的方式提高行李箱的安全性能。4. 自动称重:通过设计在行李箱侧面的称重传感器,自动测量行李箱及箱内物品的整体重量。5. 超距离 警:以定位技术为前提,识别到行李箱距离用户超过预定的距离值后,自动产生 警信 ,用以提高行李箱的安全性能。超距离 警分两个距离段,当行李箱距离用户超过1.5m时,产生一小段 警声;当距离超过2.5m时,不断产生 警声,直至距离恢复至1.5m以内。
题 目: 多功能智能跟随行李箱控制系统设计
摘要
科技产品不断融入人们的生活,给人们带来了便利。近年来,与人们出行相关的智能跟随行李箱产品不断涌入市场,其丰富的功能和自动跟随特性,在解放了人们双手的同时,也满足了人们在旅途中的需求,提高了人们的旅行体验。
在智能跟随行李箱功能的设计中,增加了指纹解锁、自动称重、超距离 警、USB双向快充四大功能,并分别根据行李箱的使用环境进行了器件选型及电路设计。在控制系统硬件设计中,提出了分布式控制系统硬件结构方案,以提高系统的实时性和可靠性。同时对控制系统中自动跟随、指纹解锁、智能称重三大系统进行了软件设计。最后,搭建多功能智能跟随行李箱实验测试平台,对系统中各模块的硬件电路及软件程序进行测试。
关键词: 自动跟随;UWB定位;智能行李箱;分布式硬件;指纹解锁
ABSTRACT
Science and technology products continue to integrate into people’s lives and bring convenience to people. In recent years, intelligent following luggage products related to people’s travel have been pouring into the market. Its rich functions and automatic following features not only liberate people’s hands, but also meet people’s needs in the journey and improve people’s travel experience.
In this paper, aiming at the deficiency of the function and automatic following performance of the intelligent following luggage in the market, and combined with people’s needs, a multi-functional intelligent following luggage control system is designed. In the design of automatic following system, the positioning technology and positioning following method are compared and analyzed, the mathematical model of trunk movement is established, and a set of automatic following method is designed. Among them, the positioning module is based on UWB positioning technology, which realizes the accurate positioning of the trunk to the user and has high anti multipath interference ability; By reducing the number of base stations, TOF + AOA can reduce the hardware cost and ensure the positioning accuracy; The industrial ultrasonic module can accurately sense the obstacles in the environment. In addition, this paper analyzes and calculates the trunk drive system to meet the power demand of the trunk.
In the design of intelligent following trunk function, four functions are added, including fingerprint unlocking, automatic weighing, over distance alarm and USB two-way fast charging. The device selection and circuit design are carried out according to the use environment of the trunk. In the hardware design of the control system, the hardware structure of the distributed control system is proposed to improve the real-time performance and reliability of the system. At the same time, the software of automatic following, fingerprint unlocking and intelligent weighing system is designed. Finally, a multi-functional intelligent test platform is built to test the hardware circuit and software program of each module in the system.
Key words: automatic following, UWB positioning, intelligent luggage, distributed hardware,fingerprint lock
目 录
(请使用CSDN左侧快捷目录)
1.绪论
1.1引言
智能行李箱产品发展至今,虽相对于初代产品有了很大的改进和优化,但在功能跟上、性价比上仍有很大缺陷,部分品牌行李箱还存在着控制效果不好的情况。如:酷哇智能跟随行李箱是采用激光雷达与摄像头的技术,扫描距离箱子最近的一个人,很容易跟错人;爱途仕使用蓝牙信 定位跟踪,但存在配对麻烦、动力不线性、容易跟丢、手动时只能纵向推动等严重影响用户使用体验。
在控制方案的选择中,基于较高的实时性和可靠性需求,选择多处理器分布式控制,同时便于控制系统的升级与维护。在其他功能的实现上,通过对相关参考文献的研读,分析了各功能实现的相关技术原理,然后进行硬、软件设计。硬件设计包括模块选型和电路设计,模块选型时,本设计基于小体积、小重量、低功耗、较高的抗干扰能力和防水能力、较高的集成能力等原则,选择出适合安装于行李箱中的模块器件。在电路设计中根据自身的知识储备以及相关硬件的用户手册、数据手册,设计出合理了的硬件方案。软件设计包括自动跟随系统软件设计、指纹解锁软件设计、智能称重软件设计三大部分,软件设计中基于硬件电路和控制器对各功能部分进行了设计。最后,对系统各功能部分进行了测试分析,在功能模块单独测试无误条件下,综合各部分模块进行联调联试,分析多功能智能跟随行李箱的综合性能。
2.系统总体设计与原理分析
本章主要对智能跟随行李箱控制系统进行总体设计规划,提出了功能需求,并分析、对比了定位与跟随技术相关的理论基础与实现方法,最后对行李箱的材质、尺寸、外观等方面进行了说明,提出了控制系统的被控对象。
2.1总体功能需求分析
根据对市场上智能跟随行李箱的调查研究以及用户的反馈,本设计的主要内容包括对定位跟随、自动避障、指纹解锁、自动称重、超距离 警、USB双向快充功能的设计。其中定位跟随与自动避障功能需达到精确定位和稳定跟随,是主要的研究对象。
定位跟随: 首先通过定位技术,确定行李箱与用户之间的相对位置,进而通过自动跟随算法,驱动箱体底部的动力电机,最终达到跟随效果。
自动避障: 利用超声波、激光雷达等测距传感器识别障碍物,进而做出躲避抉择,通过驱动箱体底部的动力电机,最终达到避障效果。
指纹解锁: 通过光电式或电容式指纹传感器进行指纹信息的采集和识别,以指纹解锁的方式提高行李箱的安全性能。
自动称重: 通过设计在行李箱侧面的称重传感器,自动测量行李箱及箱内物品的整体重量。
超距离 警: 以定位技术为前提,识别到行李箱距离用户超过预定的距离值后,自动产生 警信 ,用以提高行李箱的安全性能。超距离 警分两个距离段,当行李箱距离用户超过1.5m时,产生一小段 警声;当距离超过2.5m时,不断产生 警声,直至距离恢复至1.5m以内。
USB双向快充: 采用USB双向快充技术,通过便携式可拆卸的电源,实现为行李箱工供电的同时,可为用户的智能设备应急供电。其中快充技术的实现能够极大节省用户充电的等待时间。
通过以上的功能,旨在将现代科技带入到人们的日常生活中,为智能跟随行李箱用户更好的使用体验。对于以上功能的具体原理及技术分析,将在本章后半部分叙述。
2.2定位技术与定位方法原理分析
定位技术有很多种,但总体上分为两大类:视觉定位和非视觉定位[13]。视觉定位技术是通过视觉系统,依据图像识别的算法提取目标位置信息。非视觉定位技术主要是依靠具有能量和传播方向的信 大面积覆盖,根据信 传播时间、能量衰减、相位、角度等关系计算机器人和移动目标之间的位置关系,如超声波、激光、蓝牙、WiFi、UWB超宽带。
2.2.1定位技术分析
自动跟随系统实现的前提是定位技术,下面对主要的定位技术进行分析:
(1)视觉定位技术
借助视觉传感器完成,机器人借助单目、双目摄像头、深度摄像机、视频信 数字化设备或基于DSP的快速信 处理器等其他外部设备获取图像,
优点: 能够识别用户体态特征,运用灵活,不用携带信 源或者遥控器。
缺点: 视觉控制系统和图像处理算法较为复杂,开发难度大;由于图像处理量巨大,一般计算机无法完成运算;实时性较差且受光线条件限制较大,无法在黑暗环境中工作;成本很高;识别人的背后,人多的时候穿插走动容易误判跟丢。
(2)GPS定位技术
GPS全球卫星定位导航系统,是利用导航卫星进行测时、测距,通过地球上的接收机接收卫星发出的电磁波并进行解析,进而测算出地面点的三维坐标值,是目前市场上应用最为广泛的室外定位技术,它可以为地球表面绝大部分地区(98%)提供准确的定位。
优点: 技术成熟稳定,卫星有效覆盖范围大,不易受任何天气的影响,且定位导航信 免费。
缺点: GPS信 受建筑物的影响较大,且定位精度较低,因此室内定位并不适用。
(3)蓝牙定位技术
蓝牙定位技术是基于RSSI(Received Signal Strength
Indication,信 场强指示)定位原理。通过测量不同基站下的RSSI值,再通过定位算法计算出目标的具体位置。
优点: 受环境干扰较小,功耗低。
缺点: 传统的蓝牙定位技术作用距离短,定位精度低,不便于整合到其它系统中。
需要说明的是:蓝牙国际标准组织(SIG,Bluetooth Special Interest Group)在2018年1月28日发布的蓝牙规范实现5.1版本,通过蓝牙5.1AOA定位技术,不仅可以检测到特定对象的距离,还可以检测它所处的方向,可用以实现厘米级定位精度。
(4)红外线定位技术
通过给固定空间安放的多个红外传感器测量信 源的距离或角度,从而计算出对象所在的位置。
优点: 具有相对较高的室内定位精度。
缺点: 不适用于室外。功耗较大,且常常受到室内墙体或物体的阻隔,受热源、灯光等干扰会造成定位精度和准确度下降。实用性较差。
(5)超声波定位技术
通过适当布置传感器的位置,利用超声波测距的原理,经过计算后可以得到主体在二维或三维空间的位置。
优点: 精度可达厘米级,精度比较高,成本低,
缺点: 容易受天气、周围环境等以及障碍物阴影,表面粗糙等外界环境的影响,在空气中的传播距离比较短,适用范围较小,测距距离较短,采集速度慢,导航精度差;在传输过程中衰减明显,从而影响其定位有效范围,而且周围不能持续有同频的超声波干扰。
(6)UWB超宽带定位技术
超宽带(UWB技术)是一种无线电技术,通过标签、基站之间相互发送电磁波进行通信,进而准确地测量无线电信 的飞行时间,从而实现厘米精度的距离、位置测量。
优点: 实时性好、系统复杂度低、定位精度高、抗多能力强。
缺点: 模块成本高。
(7)RFID定位技术
与蓝牙定位技术相似,是基于RSSI定位原理。通过测量不同基站下的RSSI值,再通过定位算法计算出目标的具体位置。
优点: 成本很低,标签体积很小,可制作成薄片的形状。
缺点: 定位误差大,系统部署复杂,容易受到环境影响。
对于以上定位技术,蓝牙、RFID、UWB超宽带实现定位的方法属于信标定位和三角测量法,需要在环境内铺设信标或者信 基站,其中UWB超宽带定位成本较高。GPS卫星导航定位只能用于室外无遮挡环境,且民用GPS定位精度低,误差超过1m,而红外线定位技术则只能应用于可大面积布置信 发射源的室内[4]。
蓝牙AOA发展较晚,虽然得到了业界的积极响应和支持,但目前市场上公开的蓝牙5.1定位测向技术极少,而且蓝牙信 的多径反射问题也在一定程度上影响了行李箱定位的精度[4]。UWB在国内发展有十多年了,其应用广,市场较大,定位精度高,运行稳定。综合考虑后,本设计采用UWB定位技术实现行李箱的自动跟随与超距离 警功能。
2.2.2定位算法分析
目前的基站定位方法主要有:TOA、TDOA、TOF、RSS、AOA,下面对五种定位方法原理进行对比分析。
TOA(Time ofArrival) 是一种到达时间定位法。它是基于电磁波的传播时间,并在已知环境下布置的三个基站来协助定位的,其原理是通过3个到达时间计算出设备到三个基站的距离,然后根据几何关系求解得到目标点的相对坐标,即可得到目标点的距离和方向。TOA完全依赖于时间,对系统的时间同步要求很高,很小的时间误差都会被放大很多倍,尤其要考虑信 的多径反射问题引起的误差。
TDOA(Time Difference ofArrival) 是一种到达时间差定位法,同样需要三个已知坐标的基站,通过3个到达时间的时间差得到目标点的位置坐标,TDOA巧妙设计的求差过程可降低时间误差引起的定位误差。
如图2.2,设基站坐标分别为(x1,y1)、(x2,y2)、(x3,y3),标签为未知坐标(x,y),基站接收到标签发出的信 的时间为t1、t2、t3,t1、t2之间的时间差为t1,2,t2、t3之间的时间差为t1,3。记MS与BS1、BS2的距离差为r1,2,MS与BS1、BS3的距离差为r1,3,MS与BS2、BS3的距离差为r2,3。根据双曲线定义,可以得到一条以BS1、BS2为焦点,以r1,2为焦距的双曲线,如上图蓝色双曲线,同理可得另外两对双曲线,三对双曲线的交点即为标签位置,进而通过计算双曲线的交点即可确定MS的坐标,可列出如下方程组:
解方程组得到的坐标即为MS的坐标。
RSS定位法 是一种根据接收信 的强度来实现定位的方法。同样需要三个已知坐标的基站,通过测量3个基站的信 强度,估算出三个距离值,进而得到目标点的相对坐标。RSS定位易受信道和噪声影响,误差较大。
基站与标签之间的距离可以表示为:
其中信 的入射角可以利用TDOA或TOA或TOF法获取标签到两基站的距离,再通过几何关系计算出信 到达角度,利用相对角度从基站位置画出两条直线,两条直线的交点就是标签的位置,而且基站的位置是固定的,因此基站坐标已知。同样设基站BS1、BS2坐标分别为(x1,y1)、(x2,y2),标签为(x,y),BS1、BS2到MS的信 角度分别为α1和α2,通过角度关系可得到以下方程组,求解基站MS坐标。
如图,以行李箱所在平面中的一点O为原点,建立直角坐标系O-xy,以某时间间隔很短的相邻两个时刻行李箱的位置为研究对象。其中R是行李箱的转弯半径,L是行李箱两个驱动轮的中心间距,υL和υR分别是行李箱左、右驱动轮的速度,θ1是行李箱在相邻的两个时刻的转弯角度,θ2是行李箱在相邻两时刻航向角的变化量,θ3是辅助角,与θ1相同。设行李箱的速度为υ,角速度为ω。
由图中的几何关系可得到:
行李箱的角速度为:
行李箱的转弯半径可表示为:
普通跟随模式下,行李箱将以固定距离d跟随目标,可以根据OP和d的差值控制此时行李箱的速度v;转向时根据θ控制此时行李箱的角速度*ω,*根据两个驱动轮的中心间距的一半为转弯半径,绕坐标原点O进行转向。通过求解式(2.7)、式(2.8)即可得到两驱动轮的速度。
避障跟随模式下,通过避障传感器测得前方障碍物距离为d1,则控制两驱动轮以dl为转弯半径,绕坐标原点O进行转向,线速度与角速度与上一时刻相同,通过式(2.9)可计算出避障跟随模式下两驱动轮的速度。避障完成后,行李箱自动切换为普通跟随模式。
3.控制系统硬件设计
多功能智能跟随行李箱硬件部分包括控制器、电源、定位、动力驱动、避障、指纹解锁、自动称重、超距离 警、USB双向快充等多个部分。其中定位、动力驱动、避障三大模块构成智能跟随系统,指纹解锁、自动称重、超距离 警、USB双向快充等构成了多功能行李箱系统。本章对各功能系统进行硬件设计,涉及到复杂类型传感器的部分将进行对比选型。
3.1控制器模块
3.1.1控制方案的选择
多功能智能跟随行李箱最核心的功能是自动跟随,而实现自动跟随的前提是定位技术。定位技术对系统的实时性要求非常高,尤其是超宽带UWB定位技术与AOA定位方法。UWB技术是通过近距离高速数据传输,基站和标签之间不断的进行数据传输,而AOA定位方法是基于标签的广播信 到达不同基站时间,来计算角度和距离的,微小的时间误差可能造成较大的角度偏差。
因此,本设计基于较高的实时性和可靠性需求,选择多处理器分布式控制,将定位信 数据处理部分与传感器的环境感知及其他功能的数据处理分离进行,多处理器之间通过总线技术进行通讯[13]。另外,分布式的硬件控制系统,可以非常方便的升级与维护。
3.1.2主副控制器的选择
综合考虑系统综合性能要求和成本要求,主控制器MCU使用AVR -ATmega
2560芯片,兼容Arduino
mega2560的开源硬件原理图及核心库,并且有丰富的第三方硬件、外设、类库等支持,在数据采集和控制上,简单轻量,非常有利于系统的后期升级与维,大大短了开发的周期。副控制器MCU采用ARMSTM32F407ZET6芯片。该芯片是ST公司推出的32位ARM架构微处理器,采用Cortex-M4内核,有丰富的外设和通讯接口。主副控制器规格参数表如下。
| 微控制器核心 | ATmega2560-16AU |
|---|---|
| 工作电压 | DC+5V |
| 输出电压 | DC+5V/+3.3V |
| 数字信 I/O接口数 | 54(其中14个PWM输出接口) |
| 模拟信 输入接口数 | 16 |
| I/O接口电流 | 40mA |
| 存储资源 | 256KB的Flash 8KB的SRAM |
| EEPROM存储容量 | 4KB |
| 时钟频率 | 16MHz |
| 微控制器核心 | STM32F407ZET6 |
|---|---|
| 工作电压 | 1.8V~3.6V |
| 输出电压 | DC+5V/+3.3V |
| 数字信 I/O接口数 | 114(7组,每组16个;另外加两个PH0、PH1) |
| 输入模式 | 浮空输入、上拉输入 下拉输入、模拟输入 |
| 输出模式 | 开漏输出、复用开漏输出 推挽输出、复用推挽输出 |
| 接口类型 | 2个CAN接口、3个I2C接口、2个UART接口、3个SPI、3个USART |
| 存储资源 | 1MB的FLASH 196KB的SRAM |
| 时钟频率 | 168MHz |
3.1.3控制系统电路设计
主控制器最小系统电路主要包括供电电路、复位电路、时钟电路以及串口调试接口电路。
供电电路采用SPX1117M3-5芯片将3.8V-7.2V电源转换为5V。图中U2即为SPX1117M3-5芯片,属于三端线性稳压器,可做固定输出。C14和C10是输出滤波电容,用于抑制自激振荡,C11是输入电容,对于交流电压整流输入。稳压电源为ATmega2560芯片供电。
3.2电源模块
自动跟随行李箱为独立行走系统,因此控制器、电机、传感器等器件都需要行李箱自身携带的电源供电。本设计采用了18650锂电池组作为系统的总电源。硬件框架图如下。
其中12V的电机电机驱动模块和超距离 警模块由系统总电源直接供电,5V和3.3V相关模块由降压稳压电路供电。系统总电源可供最高18W的负载使用,而负载中动力驱动模块额定功率为9.6W,其他模块均为低功耗器件,电源功率上满足要求。
3.2.2降压稳压电路设计
本设计基于AMS1117降压稳压芯片设计加稳压电路,AMS1117具有更大的输出电流,可供系统中多个模块使用。AMS1117有多种型 规格,包括可变输出和固定输出两大类型,其中固定输出类的芯片可输出1.2V,1.5V,1.8V,2.5V,2.85V,3.0V,3.3V,和5.0V等多种电压,其内部集成有过热保护和限流保护电路,具有1%的精度。本设计采用AMS1117-3.3和AMS1117-5两种固定输出降压稳压芯片。其具体技术数据如下表。
| 温度范围 | -40~125°C |
|---|---|
| 输入电压 | 7-12V |
| 封装类型 | SOT-223 |
AMS1117实物图与引脚对应关系图如下。
上图为3.3V降压稳压电路,采用AMS1117-3.3芯片和若干电容组成。其中C25、C27为输入电容,作用是防止断电后出现电压倒置,C26、C28为输出滤波电容,作用是抑制自激振荡和稳定输出电压。5V降压稳压电路采用AMS1117-5芯片,电路设计与3.3V相同。
3.3定位模块
定位模块对行李箱自动跟随功能十分重要,硬件设计的优良决定了测距和定位的准确性,硬件框架图如下。
3.3.2 DW1000电路设计
3.4.1动力轮的设计
目前市面上自动跟随行李箱的动力驱动方式主要有三种:双轮驱动轮自平衡方式、前向/后向双轮驱动方式、中间双轮驱动方式。三种驱动方式案例如下图。
如图为中间双轮驱动方式结构图,驱动轮采用可升降式,由舵机控制驱动轮的升降。
3.4.2动力驱动需求分析
行李箱的驱动力来自驱动电机的扭矩,驱动电机将驱动轮与路面的附着力转化为地面对车辆的牵引力,行李箱运动时,驱动电机将驱动转矩Mk传到驱动轮上,产生路面作用于驱动轮边缘上向前的牵引力Ft,牵引力Ft通过行李箱底盘传到行李箱整个箱体,用来克服作用于汽车上空气阻力、地面摩擦阻力和坡道阻力。
这里采用简化理想模型对动力电机所需力矩进行计算:
根据人们的正常行走速和慢跑速度,行李箱最大速度需达到2m/s,行李箱的总体重量最高为25Kg,驱动轮轮胎直径D为6.8cm。另外通过实验测得25KG行李箱匀速行驶时的摩擦力Ff约为:8.6N,据此计算所需推动力。
根据滑动摩擦力Ff和轮胎半径r计算行李箱匀速行驶时电机所需扭矩::
Mk==Ff*r=Ff*d/2=8.6*(6.8*10^-2)/2=0.2924(N*m) ——式(3.1)
将扭矩分配到单个驱动轮,计算单个电机扭矩:
Mk1=0.5*Mk=0.1462(N*m)=1.462(kg*cm) ——式(3.2)
根据最大速度和驱动轮半径r计算电机额定转速n:
n=v/2Πr=2/2*3.14*(6.8*10^-2)/2=9.37(r/s)=562(r/min) ——式(3.3)
根据电机扭矩和电机转速,选用合适的驱动电机。
3.4.3驱动电机选型
考虑到自动跟随行李箱对调速性能要求比较高,并且电机需要提供较大的转矩,因此选用直流电机作为驱动电机。本设计采用的是自带霍尔编码器的永磁直流有刷电机。
TB6612FNG芯片能驱动两个电机,其原理图如下:
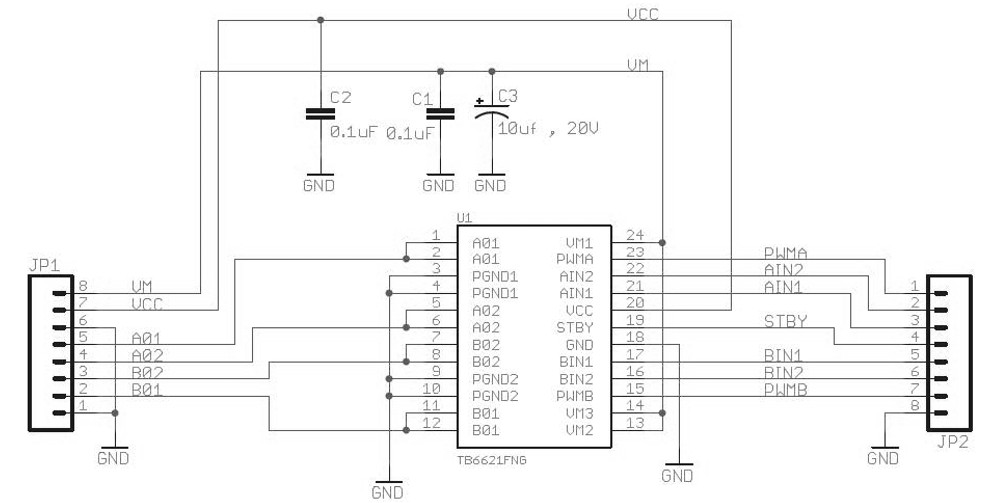

VM接12V以内电源,VCC接5V电源,GND接电源负极,A01和AO2与B01和BO2接电机的两个脚,PWMA、PWMB接单片机的PWM口,控制电机转速,STBY接单片机的IO口,低电平时电机全部停止,通过AIN1,AIN2,BIN1,BIN2控制电机正反转。逻辑真值表如下:
| 输入 | 输出 | |||||
|---|---|---|---|---|---|---|
| IN1 | IN2 | PWM | STBY | 01 | 02 | 模式 |
| H | H | HL | H | L | L | 制动 |
| L | H | H | H | L | H | 反转 |
| L | H | L | H | L | L | 制动 |
| H | L | H | H | L | L | 正转 |
| H | L | L | H | H | L | 制动 |
| L | L | H | H | OFF | 停止 | |
| HL | HL | HL |