1. 定义
无人机地面控制站是整个无人机系统非常重要的组成部分,是地面操作人员直接与无人机交互的渠道。它包括任务规划、任务回放、实时监测、数字地图、通信数据链在内的集控制、通信、数据处理于一体的综合能力,是整个无人机系统的指挥控制中心。
2. 功能
地面站系统应具有下面几个典型的功能:
- 1、飞行监控功能:无人机通过无线数据传输链路,下传飞机当前各状态信息。地面站将所有的飞行数据保存,并将主要的信息用虚拟仪表或其他控件显示,供地面操纵人员参考。同时根据飞机的状态,实时的发送控制命令,操纵无人机飞行。
- 2、地图导航功能:根据无人机下传的经纬度信息,将无人机的飞行轨迹标注在电子地图上。同时可以规划航点航线,观察无人机任务执行情况。
- 3、任务回放功能:根据保存在数据库中的飞行数据,在任务结束后,使用回放功能可以详细的观察飞行过程的每一个细节,检查任务执行效果。
- 4、天线控制功能:地面控制站实时监控天线的轴角;根据天线返回的信息,对天线校零,使之能始终对准飞机,跟踪无人机飞行。
地面站的典型功能:
地面站系统应具有以下几个典型的功能:
-
飞行器的姿态控制
在各机载传感器获得相应的飞行器飞行状态信息后,通过数据链路将这些数据以预定义的格式传输到地面站。在地面站由GCS计算机处理这些信息,根据控制律解算出控制要求,形成控制指令和控制参数,再通过数据链路将控制指令和控制参数传输到无人机上的飞控计算机,通过后者实现对飞行器的操控。 -
有效载荷数据的显示和有效载荷的控制
有效载荷是无人机任务的执行单元。地面控制站根据任务要求实现对有效载荷的控制,并通过对有效载荷状态的显示来实现对任务执行情况的监管。 -
任务规划主要包括处理战术信息、研究任务区域地图、标定飞行路线及向操作员提供规划数据等。飞行器位置监控及航线的地图显示部分主要便于操作人员实时地监控飞行器和航迹的状态。 -
导航和目标定位
无人机在执行任务过程中通过无线数据链路与地面控制站之间保持着联系。在遇到特殊情况时,需要地面控制站对其实现导航控制,使飞机按照安全的路线飞行。随着空间技术的发展,传统的惯性导航结合先进的GPS导航技术成为了无人机系统导航的主流导航技术。目标定位是指飞行器发送给地面的方位角,高度及距离数据需要附加时间标注,以便这些量可与正确的飞行器瞬时位置数据相结合来实现目标位置的最精确计算。为了精确确定目标的位置,必须通过导航技术掌握飞行器的位置,同时还要确定飞行器至目标的短矢量的角度和距离,因此目标定位技术和飞行器导航技术之间有着非常紧密的联系。 -
与其他子系统的通信链路
该通信链路用于指挥、控制和分发无人机收集的信息。随着计算机和 络技术的发展,现行的通信链路主要借助局域 来进行数据的共享,这样与其他组织的通讯不单纯的是在任务结束以后,更重要的是在任务执行期间,通过相关专业的人员对共享数据进行多层次的分析,及时地提出反馈意见,再由现场指挥人员根据这些意见,对预先规划的任务立即做出修改,从而能充分利用很多资源,从战场全局对完成任务提供有力的支持和合理的建议,使得地面站当前的工作更加有效。
3. 系统
无人机地面控制站软件的功能包括飞行监控、航线规划、任务回放、地图导航等,并且支持多架无人机的控制与管理。无人机与地面控制站通过无线数传电台通信,按照通信协议将收到的数据解析并显示,同时将数据实时存储到数据库中。在任务结束后读取数据库进行任务回放。系统模块结构如图所示。
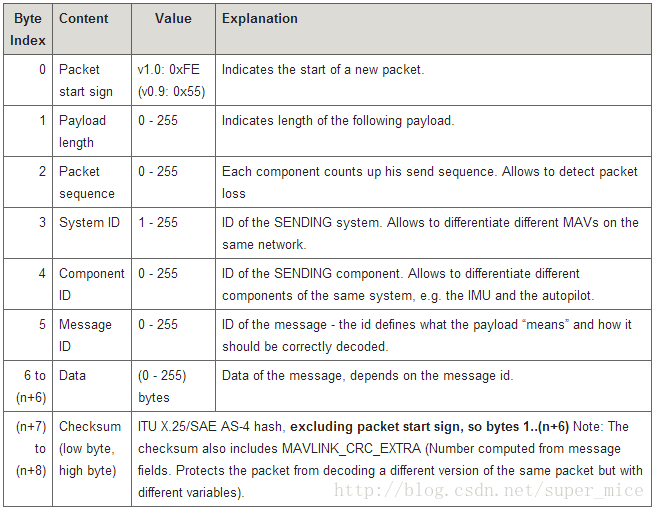
如图所示,每个消息帧都是上述的结构,除了灰色外,其他的格子都代表了一个字节的数据。
红色的是起始标志位(stx),在v1.0版本中以“FE”作为起始标志。这个标志位在mavlink消息帧接收端进行消息解码时有用处。
第二个格子代表的是灰色部分(payload,称作有效载荷,要用的数据在有效载荷里面)的字节长度(len),范围从0到255之间。在mavlink消息帧接收端可以用它和实际收到的有效载荷的长度比较,以验证有效载荷的长度是否正确。
第三个格子代表的是本次消息帧的序 (seq),每次发完一个消息,这个字节的内容会加1,加到255后会从0重新开始。这个序 用于mavlink消息帧接收端计算消息丢失比例用的,相当于是信 强度。
第四个格子代表了发送本条消息帧的设备的系统编 (sys),使用PIXHAWK刷PX4固件时默认的系统编 为1,用于mavlink消息帧接收端识别是哪个设备发来的消息。
第五个格子代表了发送本条消息帧的设备的单元编 (comp),使用PIXHAWK刷PX4固件时默认的单元编 为50,用于mavlink消息帧接收端识别是设备的哪个单元发来的消息(暂时没什么用) 。
第六个格子代表了有效载荷中消息包的编 (msg),注意它和序 是不同的,这个字节很重要,mavlink消息帧接收端要根据这个编 来确定有效载荷里到底放了什么消息包并根据编 选择对应的方式来处理有效载荷里的信息包。
最后两个字节是16位校验位,ckb是高八位,cka是低八位。校验码由crc16算法得到,算法将整个消息(从起始位开始到有效载荷结束,还要额外加上个MAVLINK_CRC_EXTRA字节)进行crc16计算,得出一个16位的校验码。之前提到的每种有效载荷里信息包(由消息包编 来表明是哪种消息包)会对应一个MAVLINK_CRC_EXTRA,这个 MAVLINK_CRC_EXTRA 是由生成mavlink代码的xml文件生成的,加入这个额外的东西是为了当飞行器和地面站使用不同版本的mavlink协议时,双方计算得到的校验码会不同,这样不同版本间的mavlink协议就不会在一起正常工作,避免了由于不同版本间通讯时带来的重大潜在问题。
为了方便叙述,消息包将称作包,包所代表的信息称作消息。上图中的sys将称为sysid,comp将称为compid,msg将称为msgid。
官方的介绍如下图:

声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!