自动驾驶仿真平台概述
文章目录
- 自动驾驶仿真平台概述
-
- 1. 前言
- 2. 51 Sim-One平台
- 3. Virtual Test Drive
-
- 3.1 静态场景文件
-
- **3.1.1 tdo文件**
- **3.1.2 osgb文件**
- **3.1.3 xodr文件**
- 3.2 动态场景
- 3.3 软件功能
- 4. 仿真标准
-
- 4.1 OpenDRIVE
- 4.2 OpenCRG
- 4.3 OpenSCENARIO
- 参考链接
1. 前言
梳理各大仿真平台的主要功能以及自动驾驶领域仿真标准。
2. 51 Sim-One平台
静态场景
51Sim-One Cloud支持导入标准OpenDrive1.4格式的地图文件来自动构建静态场景,同时51WORLD也有独立自研场景构建软件World Editor,能够快速地从无到有创建基于OpenDrive的路 ,或者通过点云数据或地图影像等真实数据来还原路 信息。
动态场景
案例库
51Sim-One Cloud内置一系列危险工况案例库以及行业标准案例库,可用于自动驾驶算法的快速测试。
传感器仿真
51Sim-One Cloud支持目标级传感器的仿真。
控制系统仿真
51Sim-One Cloud提供丰富的接口来对接您的控制系统,包括但不限于LCM、Protobuf的接口、规划、融合算法、方向盘、模拟器等人工驾驶输入。51Sim-One Cloud支持多种对接方式,您可以选择只接入感知系统进行目标识别和预测的测试,也可以选择直接跳过感知系统从决策系统输入接入,或者将两者同时接入进行整体测试与训练。
动力学仿真
51Sim-One Cloud提供了一套自研的动力学系统,可以自定义车辆动力学的各种参数,包括车辆的外观、尺寸,以及动力总成、轮胎、转向系统与悬挂特性等。
3. Virtual Test Drive
VTD (VirtualTest Drive)是德国 VIRES公司开发的一套用于ADAS,主动安全和自动驾驶的完整模块化仿真工具链。VIRES已经于2017年被MSC软件集团收购。VTD目前运行于Linux平台,它的功能覆盖了道路环境建模、 交通场景建模、天气和环境模拟、 简单和物理真实的传感器仿真、场景仿真管理以及高精度的实时画面渲染等。可以支持从SIL到HIL和VIL的全周期开发流程,开放式的模块式框架可以方便的与第三方的工具和插件联合仿真。VIRES也是广泛应用的自动驾驶仿真开放格式OpenDrive,OpenCRG和OpenScenario的主要贡献者,VTD的功能和存储也依托于这些开放格式。VTD的仿真流程主要由路 搭建,动态场景配置, 仿真运行三个步骤组成。
3.1 静态场景文件
3.1.1 tdo文件
3.1.2 osgb文件
3.1.3 xodr文件
3.2 动态场景
VTD中的Scenario Editor模块在静态场景的基础上布置动态场景(交通参与者的动作以及交通设施的动态信 )。
3.3 软件功能
关于软件功能和主要操作可以参考链接中的软件操作说明书。
4. 仿真标准
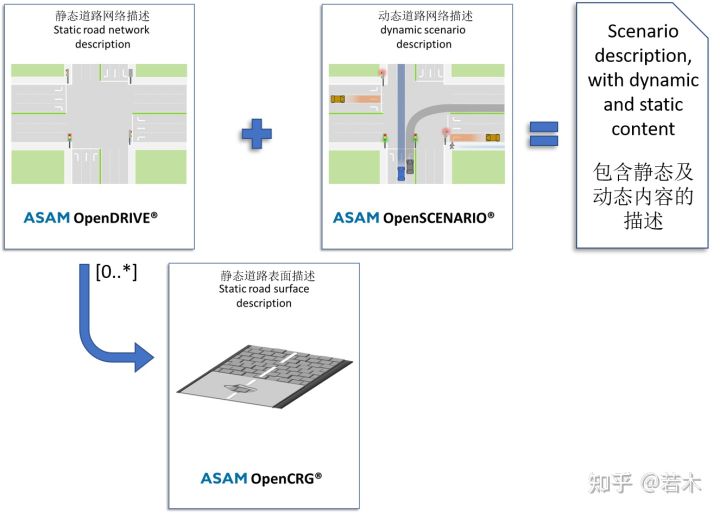
OpenDRIVE定义了一种静态道路 的存储格式,其可以对仿真中车辆道路环境进行描述,如道路位置,道路形状,道路连接形式以及道路逻辑等,文件以**.xodr为拓展格式。OpenCRG提供道路表面信息描写,如柏油马路或砖瓦路等,文件以.osgb为拓展格式。OpenDRIVE和OpenCRG相结合可以构建完全仿真静态场景。OpenSCENARIO提供仿真场景中动态场景的描述,如车辆和行人等交通参与者的行为**,文件后缀为**.xosc**。
OpenDRIVE和OpenCRG只包含静态内容。要添加动态内容,需要OpenSCENARIO。这三个标准结合起来,提供了一个包含静态和动态内容的交通模拟的情景驱动描述。

4.1 OpenDRIVE
OpenDRIVE格式是以可扩展标记语言(XML)为基础,文件后缀为.xodr格式的描述道路及道路 的通用标准。存储在OpenDRIVE文件中的数据描述了道路的几何形状以及沿线的特征并且定义了可以影响交通逻辑的其他元素,例如车道和信 灯。
OpenDRIVE文件中描述的路 可以是人工建立的虚拟道路 络,也可以是通过真实道路信息生成的。OpenDRIVE的主要目的是提供一种可用于仿真模拟的道路 络描述,并且可以使得这些道路以及道路 的描述可以在仿真平台或仿真软件中被自定义或改变。
4.2 OpenCRG
OpenCRG用来描述道路表面的后缀为.osgb格式的文件。在OpenDRIVE中可以引用OpenCRG创建的数据。无论是OpenDRIVE还是OpenCRG,都不包含有关路面视觉表现的数据。所以利用OpenCRG,可以对详细的路面属性进行建模。
4.3 OpenSCENARIO
OpenSCENARIO是定义了仿真场景的动态内容(如交通参与者的行为)后缀为.xosc格式的文件。静态场景部分(如道路 )不是OpenSCENARIO的一部分,但可以引用静态场景。
OpenSCENARIO定义了一个数据模型和一个派生的文件格式,该文件用于描述用于驾驶和交通模拟器,以及汽车虚拟仿真开发、测试和验证的场景。OpenSCENARIO的主要用途是描述复杂的、同步的、涉及多个实体实例(如车辆、行人和其他交通参与者)的动作。场景的描述可以基于驾驶员的行为(例如,车道变更)或轨迹得出。该标准通过定义层次元素提供了场景的描述方法,从这些元素中构建了场景、其属性和关系。
参考链接
[1]. 51Sim-One Cloud
[2]. VTD场景搭建从听说到入门(零)
[3]. 自动驾驶场景仿真标准
[4]. VTD软件说明书阅读之ROD
[5]. VTD软件说明书阅读之Scenario Editor
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!