1. 什么是 ADASIS v3h3>
ADASIS(Advanced Driver Assistance Systems Interface Specification)直译过来就是 ADAS 接口规格,它要负责的东西其实很简单,就是为自动驾驶车辆提供前方道路交通相关的数据,这些数据被抽象成一个标准化的概念:ADAS Horizon。
数据从地图应用来,要传输到车内的 ADAS 软件应用中。我们常见的互联 传输协议是 Http,内容封装协一般是 json、protocol buffer、xml 等等。但汽车中的数据通信不同于互联 ,一般走 CAN 通信,类似于 json,ADASIS v3 就定义了如何在汽车这个大平台下进行数据传输。
简而言之,ADASIS v3 就是一个用于地图数据传输的通信协议。
2. 为什么需要 ADASISh3>
做自动驾驶的公司很多,有主机厂、零部件供应商、图商等等。
如果是人驾驶车辆,用基本的导航地图就好了,精度大概在 10 米左右。
从 ADAS 开始,汽车会在某些时候自己进行驾驶,这对于道路感知的要求比较高,ADAS 地图正好可以解决这个问题,ADAS 地图精度大概在 1 米左右。
而未来高度自动驾驶的到来,ADAS 地图的精度就不够用了,因此图商就发力做高精度地图,精度可以达到分米级,配合高精度定位,定位精度能够到厘米级,这种精度能够满足汽车在道路上自动驾驶。
可有一个问题就是从普通的导航地图,再到 ADAS 地图,再到高精度地图,地图的信息是越来越丰富,但每公里的数据量也越来越大。
而汽车上的软件一般跑在 ECU 当中,或者域控制器当中,即使是 Tesla 安置超强的计算平台 FSD,针对这么多的数据量传输也是个头痛的事情。
所以,针对地图与汽车软件之间数据传输就需要好好规划,这需要一套高效、标准的通信协议。
ADASIS 就是这样的协议,它并不是唯一的协议,但它标准、规范,比较多的主机厂参与。
再强调一次,它标准、规范,这说明很多人用。
假设每个主机厂都有一套数据协议,每个图商也有自己的地图传输协议,那这就属于耦合过深,不同车型开发时,将要花费许多额外的时间去做适配,而时间就是金钱。
ADASIS v1 在 2005 年发布,但没有人用。
ADASIS v2 改进了很多,基于 CAN 通信。
ADASIS v3 面向车载以太 通信,带宽更大,所以能够支持高度自动驾驶。
3. ADASIS 基础概念
3.1 基本要素
地图信息很多,对于地图的表示也可以按照功能要求从简单到复杂。
ADASIS 倾向于尽可能简单。
如上图所示,你没有必要把每条街道推送给汽车软件,因为很多不需要,所以最简单也是可行的就是尽量推送少但有用的信息。
什么是少但有用的信息呢p>
ADASIS v3 给出答案是:
- 前方道路
- 可能的道路
于是,Path 的概念就应运而生,可以看看上图那根红线。
Path 精简了地图数据,它只关注汽车可能行驶的路线。
3.2 Path
世上的路千万条,但你每次驾驶时都是走一条确定的路线,这条路线就叫做 Path,它是一种驾驶的可能性。
有了 Path 就可以将路 压缩成线性地图表示。
说是线性,我们可以将 path 看作是一条线,线上挂着许多类别的铃铛、星星等等。
汽车要向前方行驶,Path 信息可以简略表达,也可以复杂点表达。
3.2.1 Simple Path Representation
Simple Path 代表简略表达路 的策略。
如果告诉汽车,要去上图中 Link235 处,那么,有 2 种路由:
- 200 -> 210 -> 230 -> 215 -> 235
- 200 -> 205 -> 220 -> 235
把每种可能的路径用 Path 表示出来,而不是把所有的 Link 展示出来就是 Simple Path 的思想,会产生如下结果。
ADAS Horizon 构造器会将汽车最有可能继续行驶的 Path 作为 root path,一般也是 MPP(Most Prefere Path),而 root-path 下的第一层 sub-path 会作为备选路径。
比如,上图中汽车向前,大概率会沿着 Path2 的方向,但 Path4、Path1、Path3 也是有可能的。
Path 是 ADAS Horizon 最主要的实体,像道路上的路标、十字路口、车道几何信息什么的可以当作 Path 当中的 Attributes。
所以,AHP 首要任务是要传输 Path 信息,AHR 首要任务是要根据 Path 进行路径重建。
以 Step 为例说明,我们都知道在高速上限速是按区间的。
另外,需要注意的是 Position 中的时间戳是全局的,这代表 Provider 和 Reconstructor 的时间是同步没有偏差的,有这个前提才能进行时间对齐。
3.4.1 Preferred Path
Position 中还有一个重要的信息就是 Preferred Path,它代表倾向性的驾驶路径,可以用来描述 MPP(Most Preferred Path),ADAS Horizon 假设汽车会最大可能沿着这条路径继续下去。
基础的 ADASIS v3 由一个 AHP 和多个 AHR 组成,它们分别代表内容提供者和内容重构者角色,中间进行数据通信。
通信可能走车内 络,如 CAN 或者是车载以太 。
也可能 AHP 和 AHR 就在同一台计算平台上。
这代表分布式和集中式两种架构。
把话题拉回来,通信要传输数据,如何保证高效又不出错呢需要建立一套同步机制。
4.1 同步机制
ADASIS v3 的同步机制有 2 个核心概念:
- Path Control
- Profile Control
一个负责建立骨架,一个负责向里面填充血肉。
4.1.1 路径同步
其实非常简单,和自动驾驶目标跟踪航迹管理差不多。
ADASIS v3 中 Path 有自己的生命周期,Path 上的 data 也有自己的生命周期。
当车辆在一条 path 上的位置相对 profile control offset 超过 trailing length 时,offset 前面的 data 就可以被删除掉了。也就是蓝色部分。绿色部分是要保留的内容。
当然,path1 继续保留,直到有明确机制它要被删除,这就是 path 和 path-data 生命周期分离的机制。
Profile 里面的数据同步也离不开这 3 个步骤:
- 创建
- 更新
- 删除
4.1.3 Value Update
每一个 Profile 有一个 ID 编 ,这让 AHP 和 AHR 之间可以有数值更新的基础。
所以,可以形成一个主 AHP,一个辅助性的 AHP.
5.2 上游融合
这个算前融合。
Provider 这一侧提前把信息进行融合,AHR 端直接做应用算法处理了。
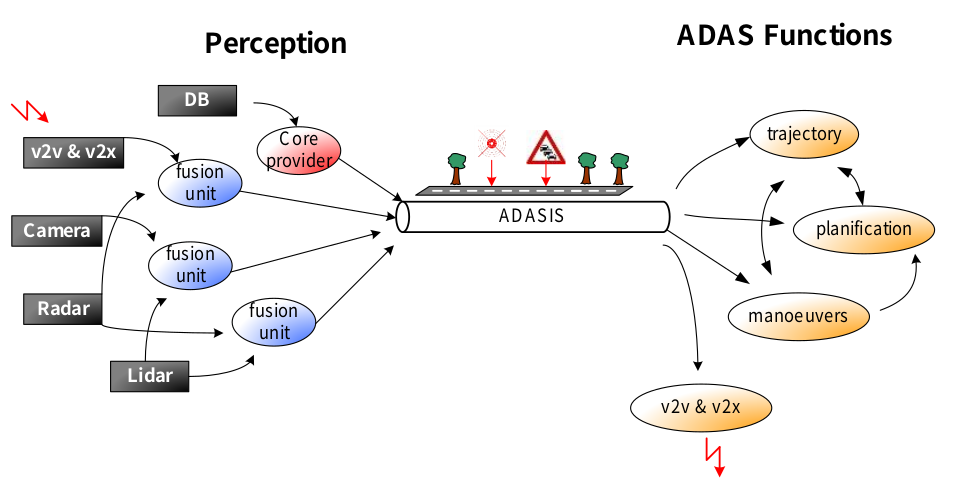

因为前融合可以有效节省通信带宽,所以我个人而言倾向于这一种。
当然,具体使用哪种要结合实际更复杂的情况。
总结
因为篇幅有限,没有办法完完整整介绍所有的内容,实际开发如果要参考 ADASIS v3 需要自己仔细阅读文档及参考文档。
当然,前面已经讲过 ADASIS v3 只是地图数据通信协议的一种,你大可根据它的优缺点建立自己的一套体系,但我还是倾向于遵从它,因为汽车行业是个讲标准的行业。
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!