整车控制器(VCU)策略及开发流程
一、VCU的作用与功能
在电动汽车中,VCU是核心控制部件,它根据加速踏板位置、档位、制动踏板力等驾驶员的操作意图和蓄电池的荷电状态计算出运行所需要的电机输出转矩等参数,从而协调各个动力部件的运动,保障电动汽车的正常行驶。此外,可通过行车充电和制动能量的回收等实现较高的能量效率。在完成能量和动力控制部分控制的同时,VCU还可以与智能化的车身系统一起控制车上的用电设备,以保证驾驶的及时性和安全性。因此,VCU的设计直接影响着汽车的动力性、经济性、可靠性和其他性能。
更多VCU策略,
整车控制器策略正向开发:https://download.csdn.net/download/weixin_43569398/15765546
VCU标定策略:https://download.csdn.net/download/weixin_43569398/14927875
VCU设计说明书1:https://download.csdn.net/download/weixin_43569398/15162084
VCU设计说明书2:https://download.csdn.net/download/weixin_43569398/15162092
VCU设计说明书3:https://download.csdn.net/download/weixin_43569398/15162101
VCU标定应用:https://download.csdn.net/download/weixin_43569398/14927875
整车控制器策略(包含混动汽车):https://download.csdn.net/download/weixin_43569398/14986783
1、VCU主要功能
4)整车设备管理
监控各设备运行状态,及时进行动态调整。
5)系统控制
根据既定的操控程序对驾驶员的各项操作进行及时响应,实时与数据库进行比对,对各节点进行动态控制。
其主要包含电源电路、开关量输入/输出模块、模拟量输入模块及CAN通讯模块。
1)电源模块从车载12V蓄电池取电,开关量输入模块接收的信 主要有钥匙信 、挡位信 、制动开关信 等;
2)开关量输出信 主要是控制继电器,其在不同整车系统中意义略有不同,一般情况下控制如水泵继电器及PTC继电器等;
3)模拟量输入模块采集加速踏板和制动踏板开度信 及蓄电池电压信 等;
4)CAN模块负责与整车其他设备通信,主要设备有电机控制器(MCU)、电池管理系统(BMS)及充电机等。
三、整车通信 络管理
整车系统通过CAN通信 络将各个子控制系统连接在一起。整车系统通讯 络结构如下图所示。VCU起到协调管理整个通信 络的功能,是各个子设备的通信服务端。
1、自检模式
如果钥匙门信 处于ON档,则启动自检模式,闭合主继电器,同时VCU进行自检,如果自检失败进入故障处理模式,自检通过等待启动信 。
4、行驶模式
行驶模式主要根据加速踏板位置及车辆行驶状态,实时控制电机扭矩指令,实现按驾驶员意图控制车辆运行。行驶控制过程中的控制方式分为恒转扭矩控制和恒功率控制,如下图所示,VCU的控制输出是转矩,功率是约束条件。
滑行再生与制动再生采取的发电扭矩,当车速V大于车速V2的条件采取恒扭矩发电,制动再生扭矩为T2,滑行再生扭矩为T1,车速V大于车速V1小于V2时,电机制动再生或滑行再生发电扭矩按比例逐渐较小,车速小于V1取消电机发电,同时电机发电扭矩取决于与当前车速及电机的发电能力。然后经过电池准许的功率限制后输出给电机。
7、停车模式
停车模式是整车运行过程中无故障出现,驾驶者正常关闭钥匙,此模式中VCU控制电机和电池系统下电,然后控制各个附件设备关闭,完成自下电过程。
8、故障模式
整车故障一般分为2级(1级故障和2级故障)。故障来自于VCU,BMS,空调等终端设备或者加速踏板器等输入传感设备。这里定义1级故障为严重故障,2级故障为一般故障。整车系统出现2级故障时,汽车进入跛行故障模式,主要以限制系统输出功率的方式实现。整车系统出现1级故障时,整车系统进入紧急停止工作状态。
9、充电模式
充电时,插上充电枪,充电机开始工作,VCU被触发上电。在检测到充电连接信 后,VCU监控整车当前状态允许充电时启动BMS,然后BMS与充电机进行通信,启动充电过程,VCU持续监测BMS及充电机的状态信息,如果充电则仪表控制器显示充电灯充电状态。充电过程出现故障时VCU会及时切断BMS继电器,以中断充电过程,防止发生危险事故。
10、下电模式
如果钥匙门信 在OFF挡,则启动下电模式,VCU根据电机、空调等高压系统的准许下高压信 来控制BMS系统断开高压继电器,同时VCU根据电机系统的温度来确认是否要延时下电,温度降到一定范围内时,关闭电机冷却水泵和冷却风扇,关闭电源主继电器,下电完成。
1、整车故障检测处理
VCU的故障主要分为传感器(加速踏板传感器)故障、继电器(空调继电器等)故障以及CAN总线故障。传感器故障可从硬件和软件两方面来检测处理。CAN总线故障主要有总线节点脱离和负载过高等。依据故障的严重程度,将故障分为2个等级,即2种故障模式。发生某种故障,就整车运行进入相应故障模式。
2、诊断功能
电动汽车上电子单元诸多,当某些器件出现故障时就难以快速的检测出来。为了维修人员能够快速、准确地确定故障的位置,电动汽车上VCU一般采用基于UDSISO15765协议)的诊断服务功能。
九、汽车状态的显示
VCU对汽车的状态信息进行采集和处理,将重要的状态和故障信息发送给仪表进行显示,其显示的主要内容有:
1、离线仿真阶段
1)建立对象数学模型。
2)设计控制方案。
3)以Matlab或者RTC为平台建立模型并进行仿真分析、测试,如图所示。
3、自动代码生成及集成阶段
1)利用Matlab自带的RTW或者商业的Target Link工具将整车控制策略模型自动生成C代码。
2)利用code warrir或者GNU等软件集成工具,将控制策略生成的C代码应与VCU硬件底层程序集成。
3)通过bootloader自动下载到VCU硬件系统中。
4、硬件在环(HIL)仿真
硬件在环(Hardware-in-loop,HIL)即指由硬件控制器与模拟器之间形成一个以数据、信 进行交流的闭环测试系统。通过虚拟的整车驾驶环境、道路环境的建立,与实际的控制器硬件之间建立循环系统,测试该控制器在虚拟环境下的各种功能。如下图所示。
1)合适性
VCU软件体系结构要适合于VCU软件的“功能性需求”和“非功能性需求”。
2)结构稳定性
详细设计阶段的工作如用户界面设计、数据库设计、模块设计、数据结构与算法设计等等,都必须在体系结构确定之后开展的,而编程和测试则是更后面的工作,因此体系结构应在一定的时间内保持稳定。注重软件体系结构的设计,当整车控制需求发生变化时,要保证只能对软件做些程序代码本身部分内容进行修改,不改变软件的体系结构,不得去修改软件的体系结构。
3)可扩展性
可扩展性是指软件扩展新功能的容易程度。VCU的软件可扩展性越好,表示VCU适应“变化”的能力越强,越容易软件升级换代。
4)可复用性
为使VCU能在不同类型的纯电动车辆及多能源系统车辆的兼容,VCU的体系结构需具有良好的可复用性,软件工程要设计出一种通用的体系结构模式,只有这样体系结构才可以被复用。
2、设计流程
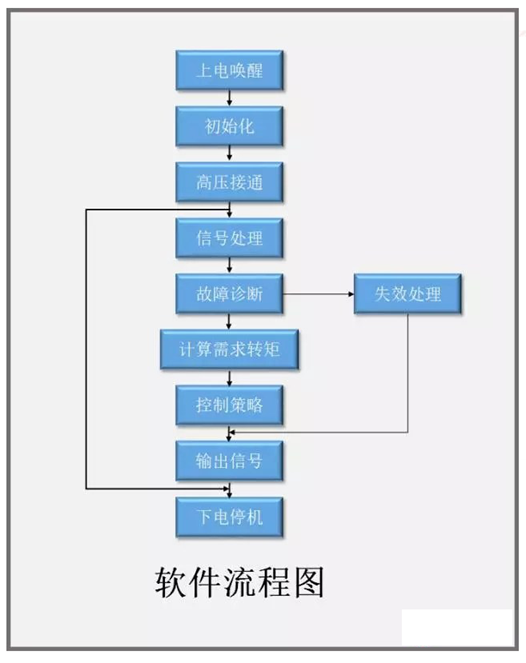

VCU软件由上层控制策略和底层驱动程序组成,用C语言编写。上层控制策略主要负责根据车辆状态和驾驶员意图实时控制能量流向和分配比例;下层软件主要负责单片机初始化设置、CAN总线信 的实时收发和其他输入、输出信 的实时处理与诊断。底层与上层的接口通过若干变量来实现。下图为设计的一个最简单的软件机制模型,从“上电唤醒”开始到“下电停机”的标准流程。
通过“信 处理、故障诊断”完成系统工作前的自检和故障诊断工作;通过“高压管理、计算需求转矩、控制策略”完成控制功能的计算和处理。
九、硬件系统
需根据整车的底盘、车身相关部件的数量和控制内容计算,要求VCU的硬件必须满足以下接口数量、种类和驱动能力:
1)10路高有效和10路低有效开关量采集。可以对车身上开关情况进行采集,VCU根据具体的开关量状态进行判断或作相应的处理。
2)3路高速CAN(CAN2.0B)。电动汽车 络总线通讯协议主要参考SAEJ1939来制定,也就是在J1939的基础上制定出满足各种电动车辆控制需要的通讯协议。VCU与外界的联系就是通过CAN 络来实现,包括数据的收集、传递。
3)8路AD采集(其中定义4路为电压采集,4路为电阻采集)。电压为0—30V采集范围,电阻为0—10kΩ。可以对踏板信 、制动信 等模拟信 进行采集,采集数据经过相应处理,并按照具体协议发送给外部设备。
4)10路功率输出(最大2A输出)。每路功率最大可输出2A左右电流,共10路,可带40W的负载。在使用过程中,应避免满负荷工作。
5)2路+5V电源输出。+5V电源输出(ImAx=0.5A),可供给踏板或其他设备。
6)1路K-LINE。通过K线可以对VCU进行诊断和标定,也可对单个设备进行数据查询。
7)支持双电源、双系统工作(推荐采用)。采用主从控制方式,正常情况下,由主机来处理整车的信息。当遇到主机无法工作(出严重故障,发送故障指令)时,从机马上作出响应接替主机工作,使整个系统能正常运行。
十、VCU性能要求
为满足VCU在整车环境下的使用需求,需要对控制器的各方面性能有所要求。VCU的主要性能要求如下表所示,具体性能要求可参考《VCU技术条件》。
整车控制器性能
项目 参数
工作电压(Vdc) 9~36V
寿命(万公里) >20V
抗震性 符合QC/T-413-2002
电磁兼容性 符合GB/T 17619
该控制器采用满足汽车使用环境温度和震动要求的高度集成汽车级微处理器,该控制器具有较宽9~36V的电源输入范围,满足整车的低压系统电源电压波动要求,同时具有较好的通用性,适应12V和24V电动汽车系统应用。控制器采用标准的ECU接口,具有良好的防水防尘性能。
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!