Ubuntu16.04上zed开发环境搭建(1)-ROS的安装
1.ROS的版本问题
(3)设置 keys
3.安装
(1)更新软件
(2)安装
有多种安装选择:
? 桌面完整版安装:包含ROS、rqt、rviz、通用机器人函数库、2D/3D仿真器、导航以及2D/3D感知功能。安装的就是这个版本,推荐安装。
? 桌面版安装: 包含ROS、rqt、rviz以及通用机器人函数库。
? 基础版安装: 包含ROS核心软件包、构建工具以及通信相关的程序库,无GUI工具。
? 单个软件包安装: 你也可以安装某个指定的ROS软件包(使用软件包名称替换掉下面的PACKAGE)
例如:
? 查看可获取的版本用:
(3)rosdep初始化
rosdep可以方便在你需要编译某些源码的时候为其安装一些系统依赖,同时也是某些ROS核心功能组件所必需用到的工具。在开始使用ROS之前你还需要初始化rosdep。
5.遇到的问题
在catkin_make时有可能会出现如下错误:
ImportError: “from catkin_pkg.package import parse_package” failed: No module named ‘catkin_pkg’
这是很有可能是由于Python的版本与catkin依赖的版本不同,先检查Python与catkin依赖的版本:
如果Python的版本与catkin依赖的版本不同,则说明Python依赖包有问题,解决办法如下:
清空工作区,我是把整个工作区全部删除,重新操作,catkin_make成功。
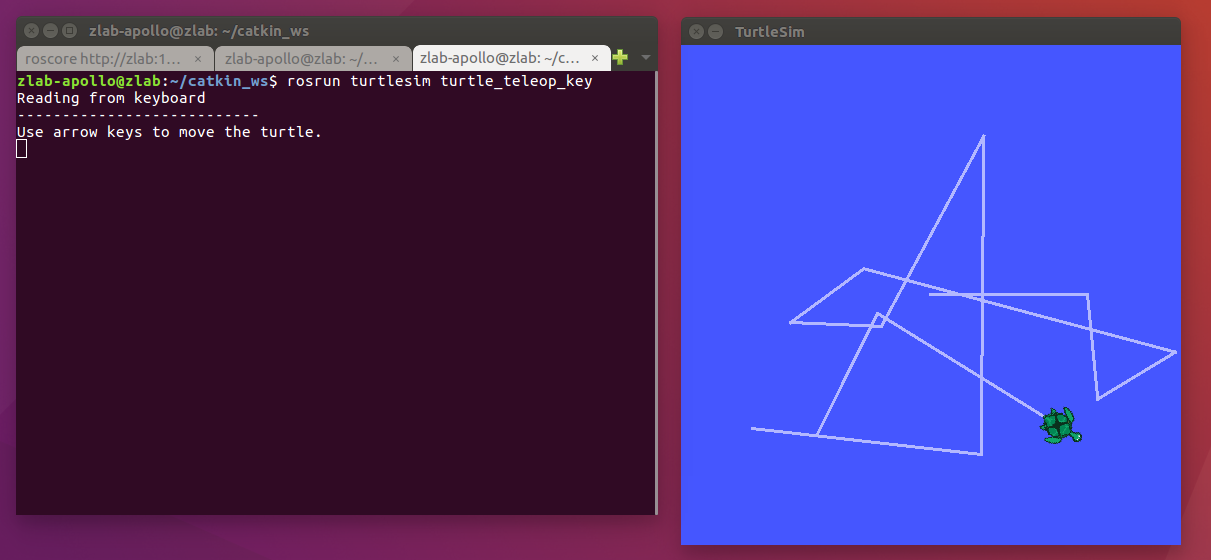
6.测试小乌龟
安装小乌龟
启动节点管理器
启动小乌龟和控制节点:
以上三个指令分别在三个终端中运行,效果如图;

声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!