ROS常用命令
查看ROS计算图:
计算图是ROS当中非常重要的概念,通过计算图可以查看整个ROS系统的整体架构,从计算图中可以看到整个系统中有哪些节点和这些节点的关系。
ROS给我们提供可视化查看计算图的工具,把主要资源以计算图可视化显示出来。
命令:
查看当前系统所有节点:
查看节点具体信息:
查看当前系统当中有哪些话题在发布或者在订阅:
查看topic的类型、发布者、订阅者:
查看在一个话题上发布的数据:
用命令行发布消息:
例:发布海龟向前运动,修改话题数据内容
这样只能发布一次话题
要指定频率连续发布多次话题可以在pub后加 -r (次数) 修改:
查看当前系统当中可使用的服务:
查看某服务的具体信息:
发布服务请求:
例:发布服务生成第二只海龟
常用绘制曲线可视化工具:
Topic那里选择话题内要监听哪些数据,然后autoscroll打钩打开,开始监听曲线,右上角暂停可以查看具体曲线变化。
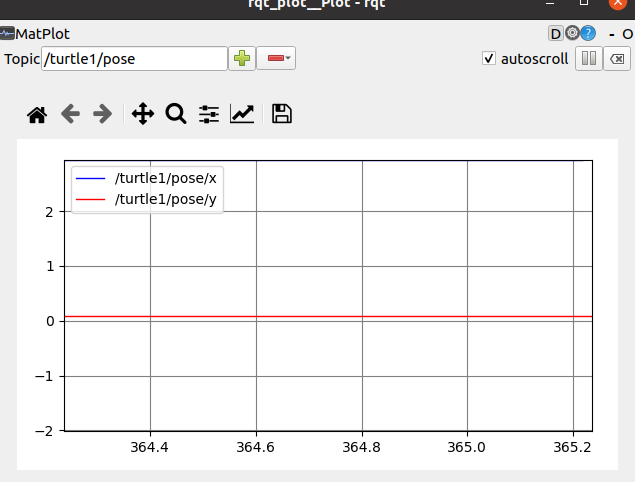

绘制曲线工具在开发中还是比较实用的,很多情况下我们可以把一些数据通过曲线更加形象的绘制出来。
打印ros环境变量:
确认环境变量已经设置正确:
打开环境变量设置文件 :
文件底部需要有下面语句:
查看软件包列表和定位软件包:
查看节点、终止节点:
查看节点构成的计算图:
测量发布频率:
查看消息类型:
查看参数列表:
查询参数:
设置参数:
创建和加载参数文件:
在启动文件中设置参数:
从文件中读取参数:
查看某一特定节点提供的服务:
查找提供特定服务的节点 :
查看服务的数据类型:
查看服务类型的详情:
从命令行调用服务:
录制包文件:
回放包文件:
检查文件包:
文章知识点与官方知识档案匹配,可进一步学习相关知识CS入门技能树Linux进阶新增用户24766 人正在系统学习中
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!