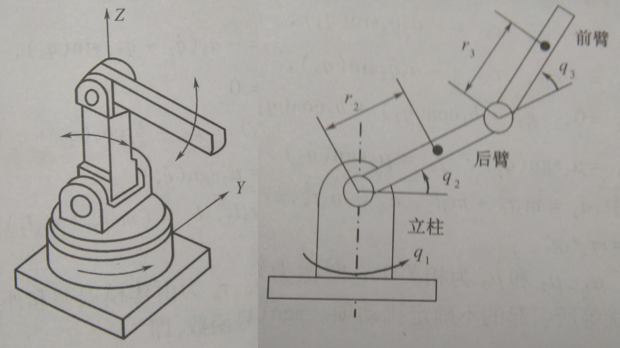
下图是三连杆机械臂,也就是常说的拟人臂。

采用拉格朗日方法并做适当简化后得到其动力学模型:
H(q)q¨+C(q,q˙)q˙+G(q)+F(q˙)+τd=τ” role=”presentation” style=”text-align: center; position: relative;”>H(q)q¨+C(q,q˙)q˙+G(q)+F(q˙)+τd=τ
其中:F(q˙)” role=”presentation” style=”position: relative;”>F(q˙) 为静态和动态摩擦矩阵, τd” role=”presentation” style=”position: relative;”>τd为建模误差和外界干扰等引起的不确定项
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!