文章目录
- 开发板
-
- 看看他香不香
- IO定义
- 设置一下root密码吧
- 更换源
- 赶紧配置VNC
- 已安装组件的使用
-
- cuda
- OpenCV
- cuDNN
- jetson nano 安装 TensorFlow GPU
-
- 安装pip
- 安装那些机器学习领域的包
- 安装TensorFlow GPU版
- ROS安装
-
- 什么是ROS
- 选用ROS系统
- 准备工作
- 开始安装
- 将安装源添加到source.list
- 添加公钥和更新系统
- 安装ROS
- 初始化ROS
- 将ROS配置信息写入环境变量,保证每一个终端启动时,都会自动执行setup.bash
- 安装一些依赖包
- 测试一下ROS是否正确安装,输入下面的命令
- 如果没有访问外服的能力一定会遇到的问题
-
- 解决方案0x01
- 解决方案0x02
- 掉坑经验
- 安装pygame
- 增加SWAP
开发板
看看他香不香
Jetson Nano 2GB是一款单板计算机,具有四核1.4GHz ARM CPU和内置的Nvidia Maxwell GPU。它是最便宜的Nvidia Jetson机型,针对的是购买树莓派的业余爱好者。
最新版操作系统将桌面环境改为LXDE 18.04,与先前的Ubuntu接口有些不同。
我感觉用这个桌面系统主要原因就是在不用到桌面很多功能的时候可以减少系统开销
55美元在某宝上大概420元左右就可以搞一手,和最新的树莓派4价格差不多。可以接触一些树莓派根本学不到的东西比如 cuda ,和一堆需要用到GPU的功能,你说香不香呢。
但是也有缺点:
- 资料很少,仅有非常少的开发文档,而官方给的一些东西都是英文,我这个英语菜鸡表示有点难受。
- 支持的系统有限,只有ubuntu
- 没有自带的WIFI和蓝牙如果不想拉 线的话只能多买一个适配器了。
IO定义
sudo gedit /usr/share/glib-2.0/schemas/org.gnome.Vino.gschema.xml
第二步:滑到最后面文末的位置,将下面这段内容全部粘贴进去
sudo glib-compile-schemas /usr/share/glib-2.0/schemas
2、打开桌面共享设置后按照如下配置即可,密码不用太复杂,好像不设置也可以。
安装pip
因为Jetson Nano中已经安装了Python3.6版本,所以安装pip还是比较简单的
sudo apt-get install python3-pip python3-dev
安装后pip是9.01版本,需要把它升级到最新版,升级后pip版本为19.0.3。这里面升级后会有一个小Bug,需要手动改一下
python3 -m pip install –upgrade pip #升级pip
sudo vim /usr/bin/pip3 #打开pip3文件
将原来的
改成
修改结束后保存。运行pip3 -V成功后显示
pip 21.1.1 from /usr/local/lib/python3.6/dist-packages/pip (python 3.6)
安装那些机器学习领域的包
安装TensorFlow GPU版
(1)确认CUDA已经被正常安装
nvcc -V
如果能看到CUDA版本 ,即为正确安装
(2)安装所需要的包
sudo apt-get install python3-pip libhdf5-serial-dev hdf5-tools
sudo apt-get install libhdf5-serial-dev hdf5-tools libhdf5-dev zlib1g-dev zip libjpeg8-dev liblapack-dev libblas-dev gfortran
pip3 install -U pip
pip3 install -U CPython testresources setuptools
pip3 install -U numpy1.16.1 future0.17.1 mock3.0.5 h5py2.9.0 keras_preprocessing1.0.5 keras_applications1.0.8 gast==0.2.2 futures protobuf pybind11
(3)安装TensorFlow GPU版本
pip3 install /home/yuri/WorkSpace/TensorFlow/tensorflow-2.2.0+nv20.6-cp36-cp36m-linux_aarch64.whl
至于这个轮文件可以到英伟达官方下载链接下载
wget https://developer.download.nvidia.com/compute/redist/jp/v44/tensorflow/tensorflow-2.2.0+nv20.6-cp36-cp36m-linux_aarch64.whl
ROS安装
什么是ROS
选用ROS系统
准备工作
其实也没啥准备的,这里有个小建议,就是准备一张新的SD卡安装ROS,一是因为ROS挺大,二是如果装了ROS,又拿同一套系统建立模型,会影响速度。SD卡建议32G以上。
开始安装
将安装源添加到source.list
sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
添加公钥和更新系统
安装ROS
sudo apt install ros-melodic-desktop-full
上面的命令是把ROS, rqt, rviz, robot-generic libraries, 2D/3D simulators一起安装了,你也可以单独安装,我就懒得写了,自己查官 去吧。
初始化ROS
将ROS配置信息写入环境变量,保证每一个终端启动时,都会自动执行setup.bash
安装一些依赖包
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
测试一下ROS是否正确安装,输入下面的命令
roscore
如果没有访问外服的能力一定会遇到的问题
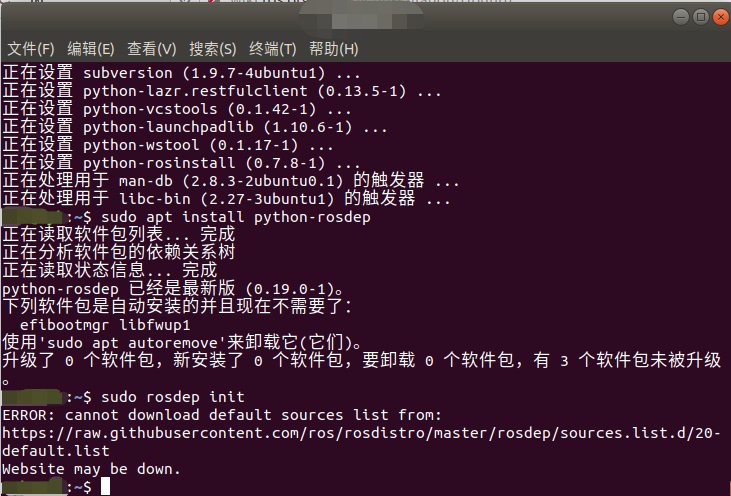

说白了就是在DNS解析的时候,直接访问127.0.0.1
可以自己ping 一下试试
解决方案0x01
如果你正遇到这个问题,那么第一个解决方案就是,更换 络,你可以尝试使用你的手机热点,然后继续尝试以下指令。
sudo rosdep init
rosdep update
解决方案0x02
该解决方案是针对由于以下两个无法正常访问,但可以ping通,于是修改hosts文件,加入以下两个 址的IP地址实现访问。
sudo gedit /etc/hosts
199.232.28.133 raw.githubusercontent.com
151.101.228.133 raw.github.com
修改完成后,在终端执行
sudo rosdep init
rosdep update
掉坑经验
经过测试用校园 访问不超过,移动手机热点访问不成功,电信手机热点访问成功
安装pygame
$ sudo apt-get install libsdl-image1.2-dev ffmpeg libsdl-mixer1.2-dev libsdl-ttf2.0-dev libsmpeg-dev libportmidi-dev libswscale-dev libavformat-dev libavcodec-dev
$ sudo apt-get -y install libfreetype6-dev
$ pip3 install pygame
增加SWAP
Nano入门教程基础篇-增加swap空间
说明:
步骤:
sudo bash -c ‘echo “/var/swapfile swap swap defaults 0 0” >> /etc/fstab’
文章知识点与官方知识档案匹配,可进一步学习相关知识Python入门技能树预备知识安装Python211205 人正在系统学习中
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!