FPGA实现CAN通信
1、CAN协议物理层和协议层
2、传输的波特率
3、FPGA实现思路
4、FPGA实现代码
1、CAN物理层和协议层
CAN与串口类似,都是异步通信,利用两根差分线来进行信 的传输。
在多节点进行数据传输时主要分为遵循ISO11898标准的高速短距离闭环形式和遵循ISO11519标准的低速远距离开环 络。这两种形式主要是在硬件设计时根据实际应用情况加入120欧姆或者2.2千欧姆电阻。
在CAN通信时信 逻辑和平时常用的电平表示不太一样,根据标准电平表示形式如下图:
在实现波特率可调的数据收发控制时需要注意的是每个波特数据的采样点。CAN数据采样时序如下图所示,一般采样点都是在数据稳当的中间点位置,因此在设计FPGA中CAN模块的时钟频率应当是数据波特率的20倍。
数据的收发需要根据实际的项目情况进行组包控制,这里就不进行细致描述了。
CAN实现数据的收发两个过程中对应FPGA来说由于接收相对复杂,就以接收模块进行描述。
数据的接收过程就按照一般的状态机进行设计就行,需要注意的是不同类型帧的跳转是在控制段进行了,因此在控制段会发生状态的跳转。CAN接收状态的状态机实现如下图:
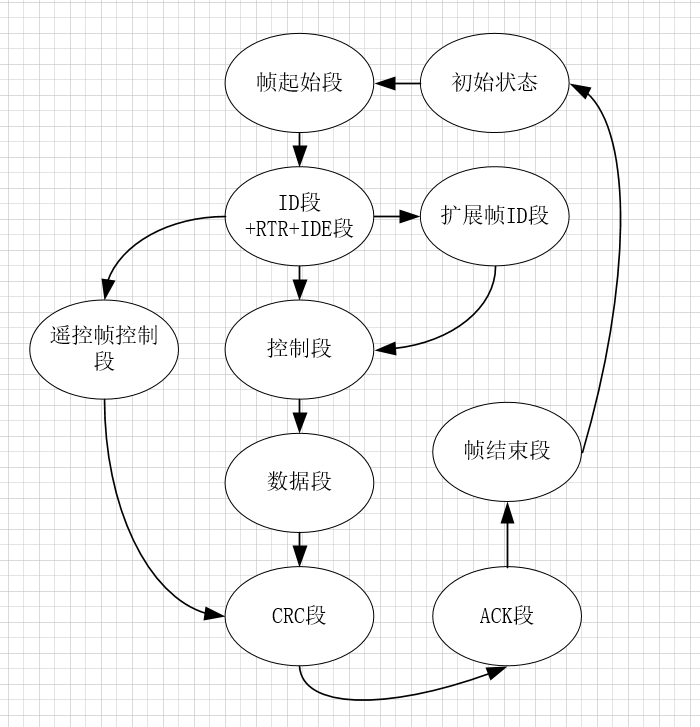

这个状态机的实现并不复杂,主要是对帧类型进行判断。然后根据数据长度把数据解析出来。下面是实现CAN数据接收代码:
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!