Ubuntu18.04 ROS 源码安装
一 安装ROS
参考:https://www.cnblogs.com/wjundong/p/10701160.html
如果安装失败,出现无法定位软件包或未满足依赖关系,就卸载已安装的错误软件,更新安装源。
卸载命令
安装源最好选择主服务器。
- 设置软件源
- 设置秘钥
- 更新源地址
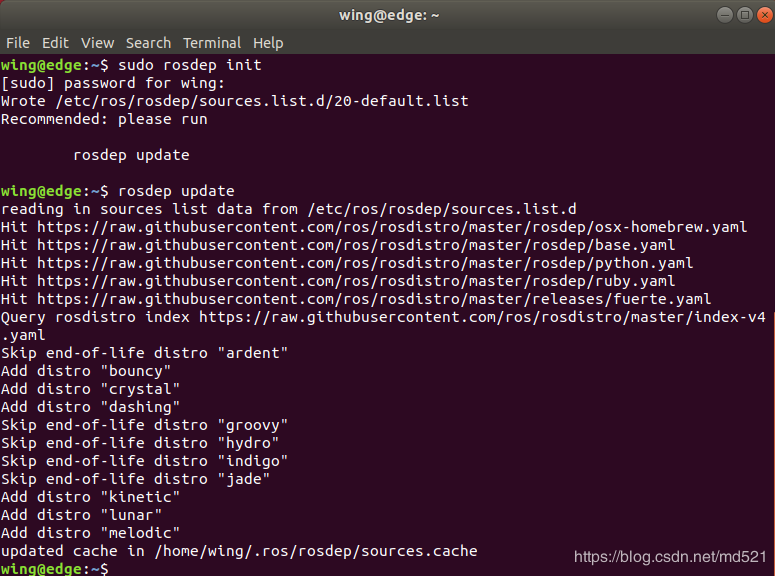
在运行上述命令之后,系统会输出一些相应的反馈信息,注意看有没有忽略和丢失的连接,如果全是获取和命中就说明没有问题
ubuntu安装ROS时遇到的“由于没有公钥,无法验证签名”问题
由于没有公钥,无法验证下列签名: NO_PUBKEY F42ED6FBAB17C654
4. 安装,在这里选择桌面完整版,你也可以选择安装一部分,具体的命令在官 教程中可以找到
- 经过很长时间的等待之后就完成了,但这时还需要一些收尾工作,这一步也很难。
错: sudo: rosdep:找不到命令
没有安装python-rosdep
然后执行:
前面每一步都会出现链接问题,方法就是换源,不停的换源和重复指令,直至成功。
发现走不通后,运行了下面的指令。
解决办法,执行如下命令
在文件末尾添加
然后就反复输入sudo rosdep init或rosdep update,直到成功。(注意,可以多进行换源操作)。

6. 设置环境变量
- 安装编译依赖库,运行下述命令。
- 测试ROS环境。
打开终端
再打开一个终端,运行下述命令。
接着打开第三个终端,运行下述命令。
在这个终端中移动键盘上下左右方向键,乌龟就可以移动了。
声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!