原文标题: Trajectory Generation and Control Methodology for an Autonomous Ground Vehicle
摘要
Nomenclature术语
1 OVERBOT介绍
GPSINS Server
最顶层的软件架构是GPSINS进程server,在Novatel GPS接收器和Omnistar High Performance subscription的加持下,定位精度可以达到分米decimeter级别。惯导结合使用卡尔曼滤波可以达到60hz的计算速度,最后GPS接收器和AHRS惯导共同提供了车辆的位置和方位信息。
Map Server
视觉部分的计数都在Map Server中实现,首先使用laser range finder来监视环境并寻找障碍物,将激光雷达的倾角和车辆的位置以及方位进行对比,就能表示出物理环境中的测量点。随着车辆前进,激光雷达不断地扫描地面,这些点累积起来,就能代表物体的表面并最终得到对障碍物的定义。所有的障碍物最终都被投射到地面并创建一个二维的,离散的地图。
Move Server
根据GPSINS的数据,规划出一条到达期望目的地的路径,Move Server主要部分是车辆的动力学和误差检测,总的来说,Move Server努力使车辆在遵循车速限制的条件下,保持速度尽可能快。一些简单的动力学限制可以用方位信息计算出来,动力学主要根据曲率和地形的不同来限制车辆的速度。最后,速度,转向和曲率信息都被计算出来,并分发到对应的速度和方向模块中。
Speed Server
主要是处理硬件运动限制,控制油门,刹车和方向盘,从Move Server接受指令,并转换到执行器来改变速度,加速度和方向盘转角。
Direction Server
接受Move Server的指令,并发送给硬件控制器。
2 Path Planning
Overbot是被设计跟随一系列路径点的,这些点描述了车辆的理想nominal路径。每一个点都必须被顺序遍历,同时还要维持在理想路径的最大误差范围maximum radius内。这个距离定义了一个关于路径的长廊corridor about path,限制了车辆允许占据的空间。在每个离散时间点中,轨迹都利用车辆的当前位置和方位,通过定义好的长廊corridor(应该翻译成可行空间和障碍物地图obstacle map规划出轨迹Trajectory。
接下来介绍两种路径规划path planning技巧
2.1 Arc Based Paths基于圆弧的路径
三次样条曲线cubic spline的方法,克服了圆弧方法的不足,样条曲线spline是一种分段piecewise的多项式函数,在轨迹规划中,样条曲线被限制成二阶导数second derivative连续,来确保路径,朝向角heading和方向盘steering转角的连续性。
为了解决圆弧方法的短视short sightedness,路径被设计成3个连续consecutive的路径点,超过3个连续点的路径超过了传感器的输入范围不被考虑。通过使用3个点,rotation确保了必须的单调性monotonicity来计算样条曲线路径,rotation定义了一个新的参考框架reference frame,并且允许样条曲线可以被给定的路径点插值interpolated。
为了确保路径的有效性,样条曲线被重新映射道GPS参考框架中,路径被离散到障碍物地图obstacle map中并且每个点pixel都被评估(安全性),每个被视觉感知到的障碍物进行膨胀inflated后保存到地图中,膨胀enlarging障碍物可以补偿车辆的宽度,这样只需要评估车辆的中心点在路径中的位置
曲线在每一个给定的碰撞旁边弯曲bend。新的点在碰撞周边vicinity of the violation进行3次样条插值cubic interpolation,通过不断地引进额外的点,曲线就可以避开障碍物,且维持在定义好的宽度内defined corridor,这个过程不断被重复,直到寻找道一条完全无碰的轨迹。
这种方法需要更多的运行时间,但是在典型的应用typical application中能生成更好的路径。
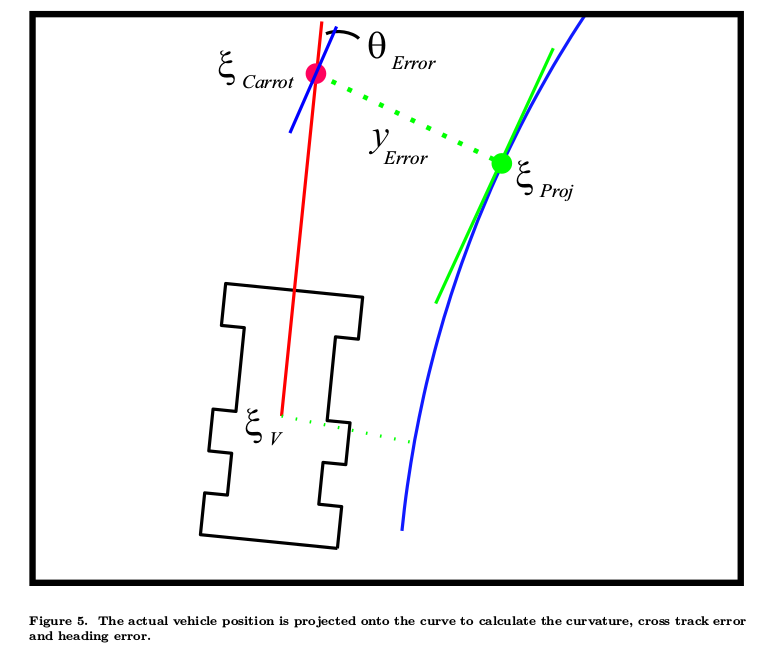
3 Contorl 控制

声明:本站部分文章及图片源自用户投稿,如本站任何资料有侵权请您尽早请联系jinwei@zod.com.cn进行处理,非常感谢!